
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
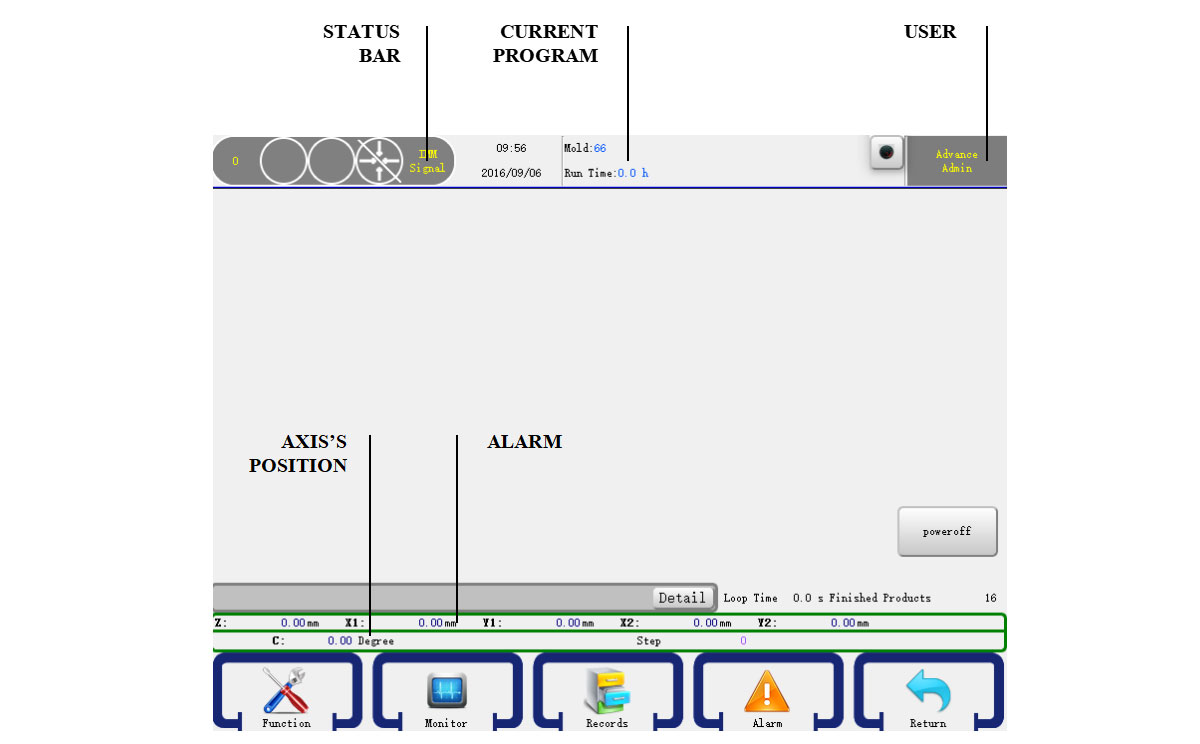
조작 패널은 작업자가 로봇 팔과 통신하는 인터페이스입니다. 조작 패널을 통해 작업자는 로봇 팔의 각 축의 속도를 시작, 정지, 프로그래밍, 조정할 수 있습니다. 이 장에서는 로봇 팔 컨트롤러(HMI)의 조작 패널에 대해 간략하게 소개합니다.
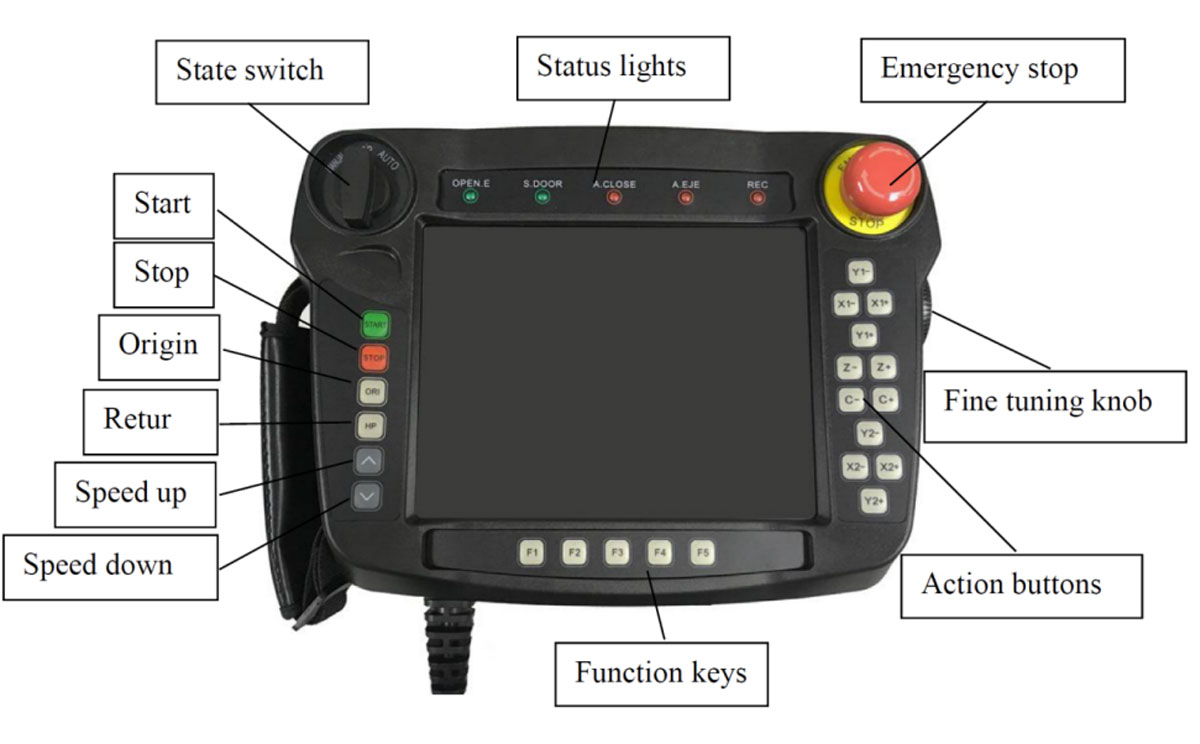
비상시에는 로봇과 다른 기계를 즉시 멈추세요.
정확한 거리 조정을 위해 스트로크를 살짝 움직이세요.
축을 수동으로 이동
Email: sales06@switek.biz


인도 고객이 2개 캐비티 1L 버킷의 새로운 IML 시스템을 테스트 중입니다.
2012년 IML 쇼 핸들 어셈블리 시스템을 말하는 Arburg
SWITEK 55L IML 쓰레기통용 신형 측면 진입 IML 로봇이 사내 테스트를 위해 준비됨
YuFa 그룹 회장인 Mr. Cai는 가정 생활 제품 생산에서 맞춤형 사출 성형기에 대한 자신의 의견을 공유했습니다.
ENGEL On Show 4+4 스택 몰드 박스 측면 입구 IML 솔루션
ENGEL 쇼 4 캐비티 125ml PET/rPET 컵 e-speed 280을 갖춘 K2022의 IML 솔루션
순환 경제에 초점을 맞춘 YIZUMI 기계는 1kg당 전력 소비를 최소화하기 위해 전기식 사출 성형 기계를 홍보하고 있습니다.
Chinaplas 2024가 곧 문을 열었습니다. 준비 되었습니까?
Fakuma 2023 -- LK IMM On Show Serov 및 전기 사출 성형기
SWITEK Automation, Chinaplas 2018에서 칼류 포장 시스템 선보여
SWITEK IML에 문의하세요
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
나를 따라와요





HuangYanZheng©Copy Right






