
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
SWITEK 3/5축 서보 로봇 팔은 다양한 금형 설계에 맞춰 100개 이상의 프로그램을 기록할 수 있습니다. 이 장에서는 USB 메모리에서 새 프로그램을 생성하고, 기존 프로그램을 백업하고, 다시 로드하는 방법과 로봇 팔이 프로그램에 어떻게 반응하는지 등을 살펴보겠습니다.
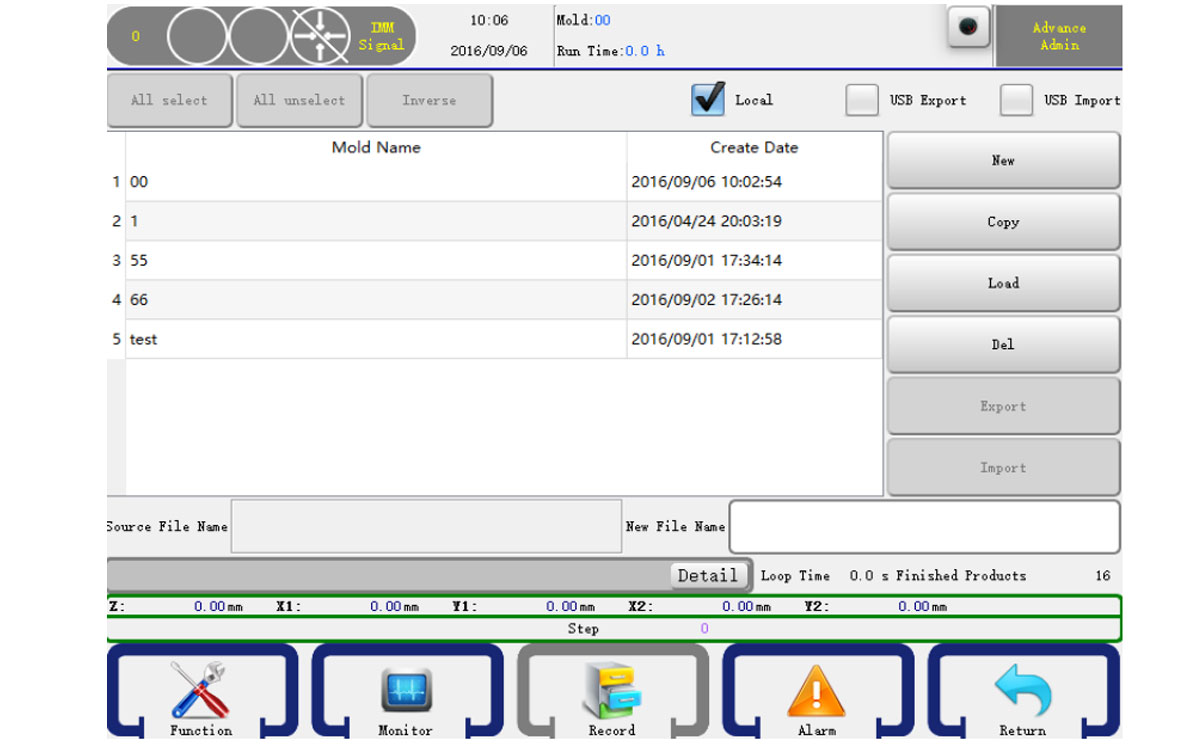
정지 상태에서 메뉴 막대의 녹화 버튼을 클릭하여 녹화 관리 페이지로 이동합니다. 이 페이지에서 프로그램을 관리할 수 있습니다. 아래 그림과 같습니다.
노브를 왼쪽으로 돌려 수동 모드로 전환한 후, 메인 메뉴 막대에서 티칭 버튼을 클릭하여 프로그램 편집기를 엽니다. 아래 그림과 같습니다.
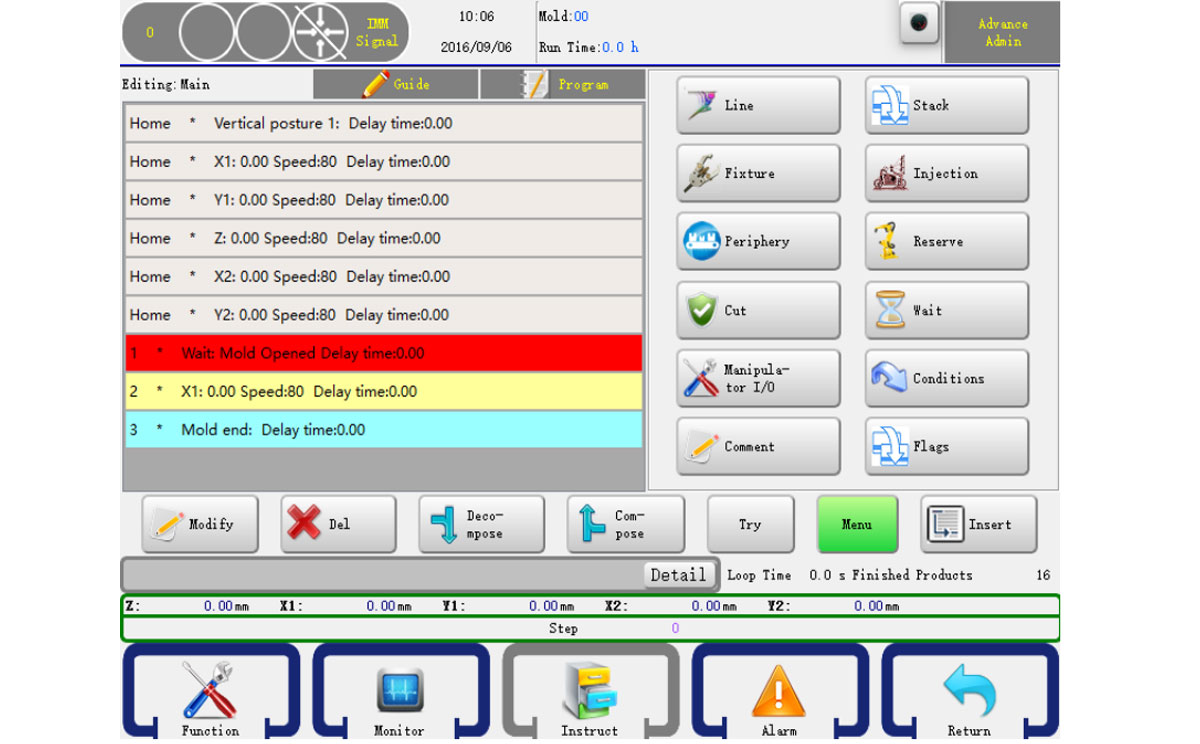
서보 동작, 스택 동작, 고정 동작, 주입 동작, 보조 동작, 예비 동작, 확인 동작, 대기 동작, 직렬 동작, 주변 동작은 "지시" 버튼에 포함되어 있습니다. 이 버튼을 클릭하면 프로그램을 편집할 수 있습니다. "지시"를 누르면 메뉴로 돌아갑니다.
지시 모드에서 결합할 동작을 선택한 후 "조합"을 클릭하면 자동 실행 시 동시에 작동하는 동일한 동작 단계가 표시됩니다. "중단" 버튼을 눌러 결합된 단계를 여러 단계로 분리할 수도 있습니다.
6.2.1 서보 동작
라인 버튼을 클릭하여 서보 액션 편집기로 이동하면 X1(X2), Y1(Y2), Z, C(자세) 축 상태를 아래와 같이 설정할 수 있습니다.
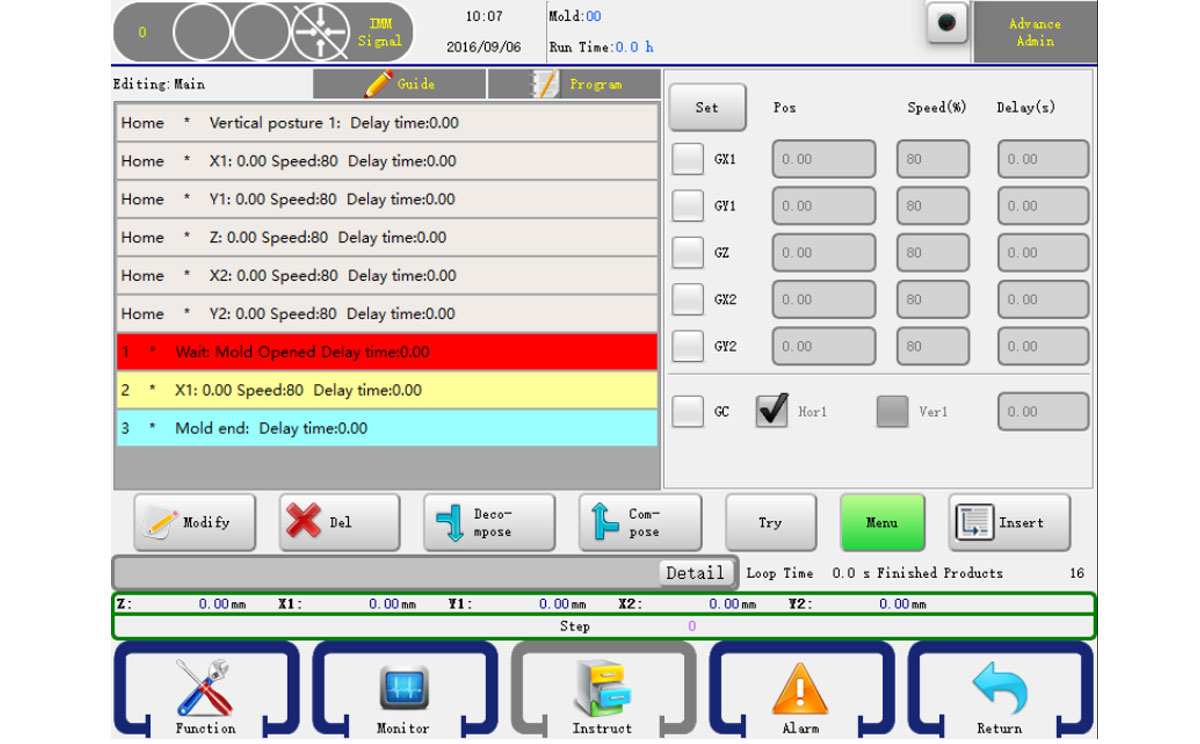
이 페이지에서는 X1(X2), Y1(Y2), Z축 위치, 동작 속도 및 지연 시간을 설정할 수 있습니다. 왼쪽에 있는 √ 아이콘을 클릭한 후, 축의 매개변수를 설정하고 "삽입" 버튼을 클릭하여 해당 설정을 확정하고 프로그램 단계에 삽입합니다.
축 위치를 설정하는 방법은 두 가지가 있습니다.
6.2.2 프로그램 시작점
6단계는 6축의 원점 위치와 포즈로 표시됩니다.
위의 [홈] 상태 중 6개 단계는 새 프로그램의 기본 단계 상태이며, "편집"을 클릭하여 축의 시작 위치, 작동 속도 및 지연 시간을 수정할 수 있으며, 삭제할 수는 없습니다.
6.2.3 스택 동작
아래와 같이 스택 액션 편집기로 이동하려면 스택 버튼을 클릭하세요.
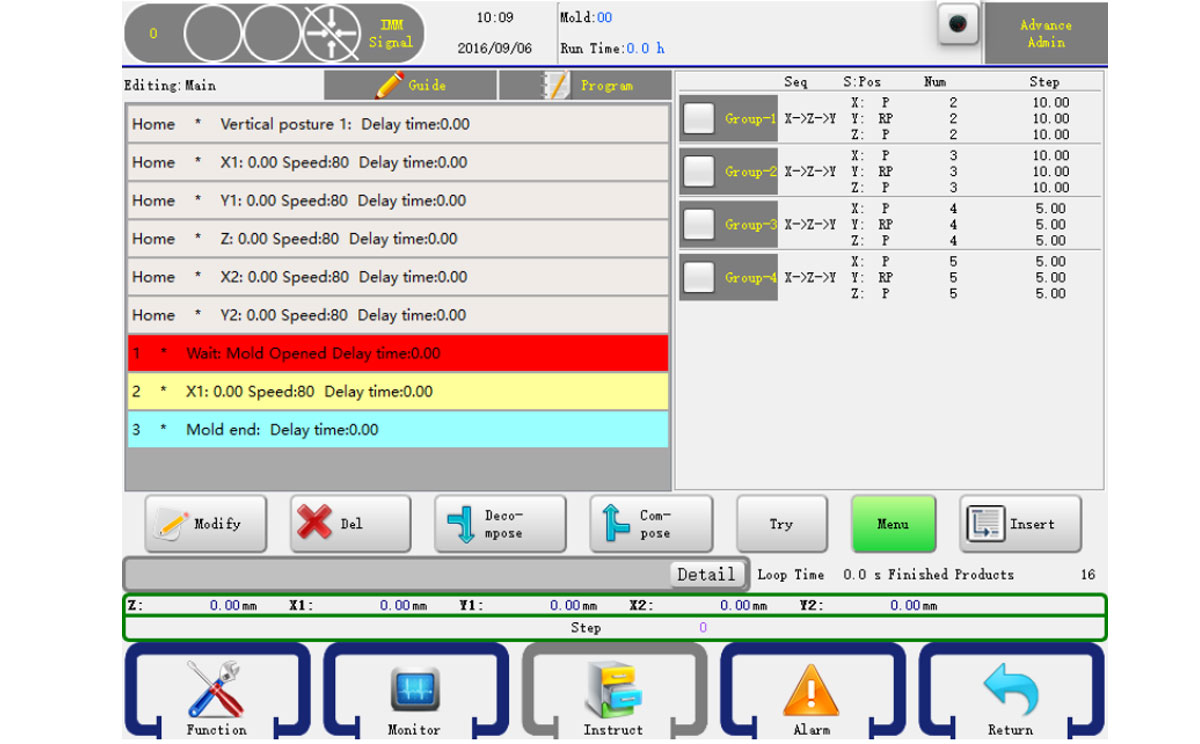
스택 왼쪽을 선택하여 프로그램 그룹을 삽입하고, 그룹을 설정한 후, 스태킹 단계 앞에 있는 삽입 버튼을 클릭하세요. 자동 작동 시 로봇이 순서대로 제품을 적재합니다.
Y축을 사용하여 스택을 사용하려면 Y축을 낮추는 작업을 하기 전에 스택이 삽입되었는지 확인해야 합니다.
6.2.4 고정 액션
아래와 같이 'Fixture' 버튼을 클릭하면 고정 장치 및 Sucker Action 편집기로 이동합니다.
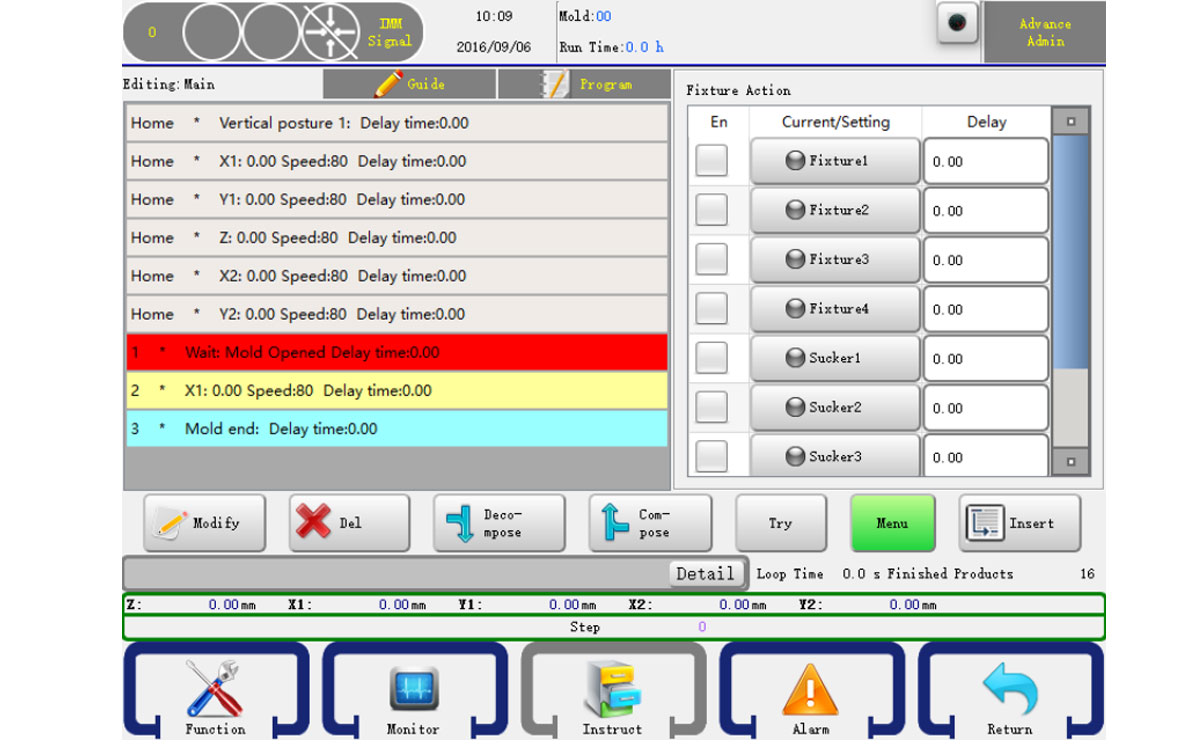
컨트롤러는 4개의 고정 장치와 2개의 흡입 액션을 설정할 수 있으며, 제어할 버튼을 클릭하면 표시등이 빨간색으로 변합니다. 그런 다음 왼쪽을 클릭하여 √으로 표시되도록 하고, "삽입"을 클릭하면 액션 단계가 선택 절차의 앞 단계에 삽입됩니다.
고정구와 서커 액션을 삽입한 후에는 반드시 체크 액션을 삽입해야 합니다. 그렇지 않으면 프로그램이 확인 신호를 테스트하지 않습니다. 신호를 확인하지 않으면 체크 액션이 필요하지 않습니다. 하지만 어쨌든 기계를 보호하기 위해 체크 액션을 사용하는 것이 좋습니다.
6.2.5 IMM 동작
아래와 같이 주입 작업 편집기로 이동하려면 주입 버튼을 클릭하세요.
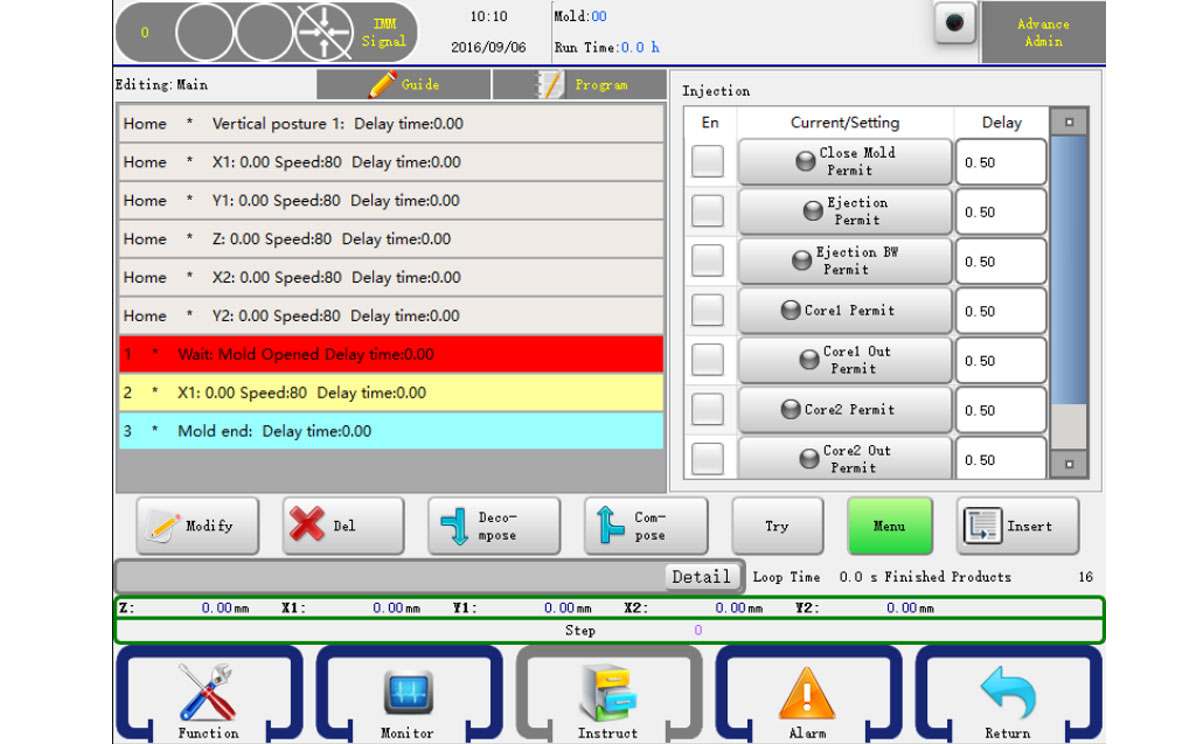
작동 방식은 프로그램 픽스처 액션과 동일합니다. 6.2.4를 참조하세요.
6.2.6 보조 동작
보조 버튼을 클릭하여 주변 작업 편집기로 이동합니다. 이 편집기에서 아래와 같이 인젝터, 컨베이어, 예비 지점 및 스택 작업을 찾을 수 있습니다.
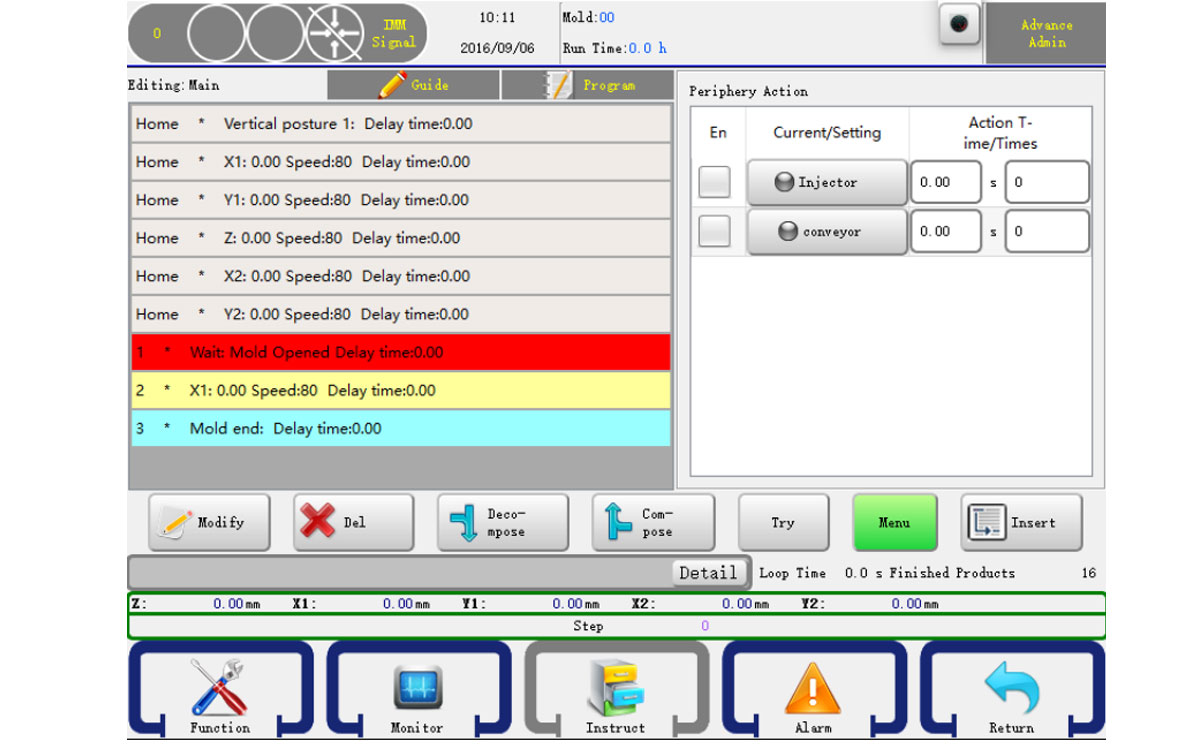
작동 방식은 프로그램 픽스처 동작과 동일합니다. 6.2.4를 참조하세요.
시간: 한 사이클에서 동작을 실행할 시간을 의미합니다.
지연: 출력 시 자동으로 금형을 몇 개까지 사용할지 설정합니다. 1~2회 간격 등으로 설정할 수 있습니다.
6.2.7 예비 조치
'예약' 버튼을 클릭하여 작업 편집기로 이동합니다. 아래 그림과 같습니다.
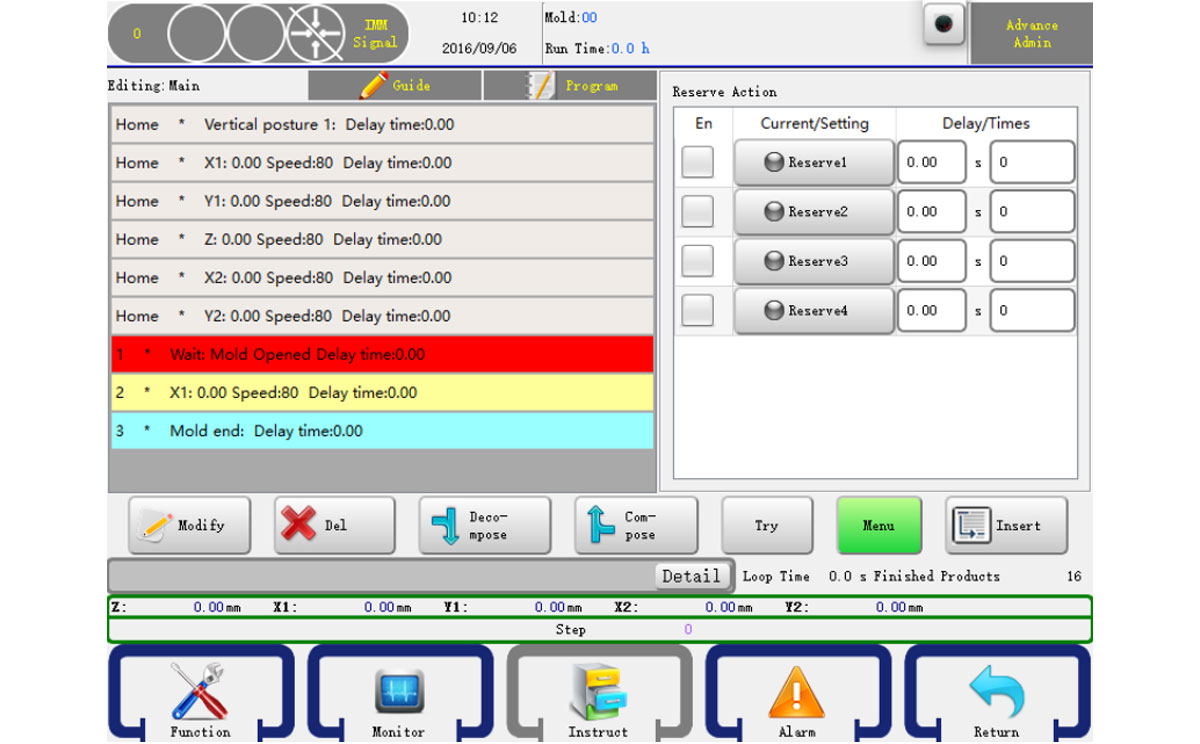
시스템에는 네 개의 예비 시간이 있습니다.
시간: 한 주기에서 작업을 실행하는 데 걸리는 시간을 의미합니다.
지연: 출력 시 자동으로 금형이 몇 개 생성될지 설정합니다. 예를 들어 1~2회마다 생성될 수 있습니다.
6.2.8 대기 동작
대기 버튼을 클릭하여 대기 동작 편집기로 이동합니다. 이 동작은 대기하려는 입력 신호가 켜지기 전에 프로그램이 중지됨을 의미합니다. 편집기는 아래와 같습니다.
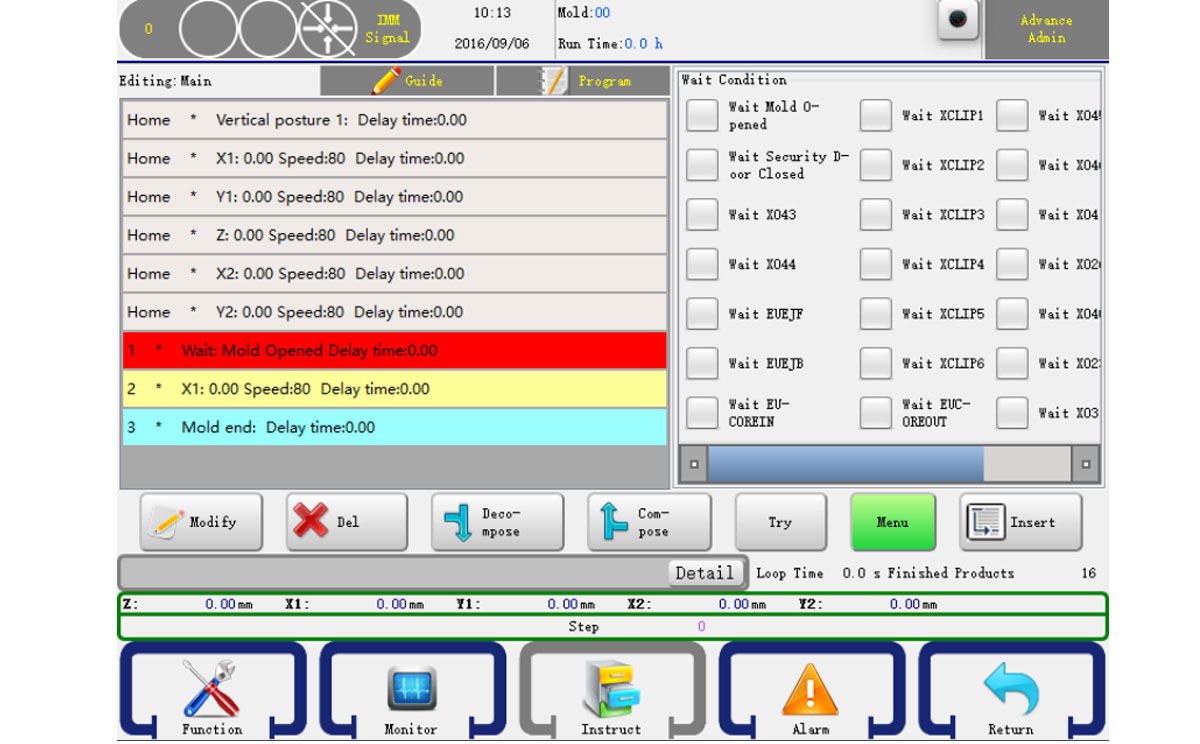
기다리고 싶은 신호를 선택하고 삽입 버튼을 클릭하여 변경 사항을 확인하세요.
6.2.9 코멘트
'댓글' 버튼을 클릭하면 댓글 편집기로 이동합니다. 여기에서 프로그램에 대한 의견을 남길 수 있습니다.

가상 키보드를 사용하여 정보를 입력할 수 있습니다.

6.2.10 조건
프로그램에서 조건을 설정할 수도 있습니다.
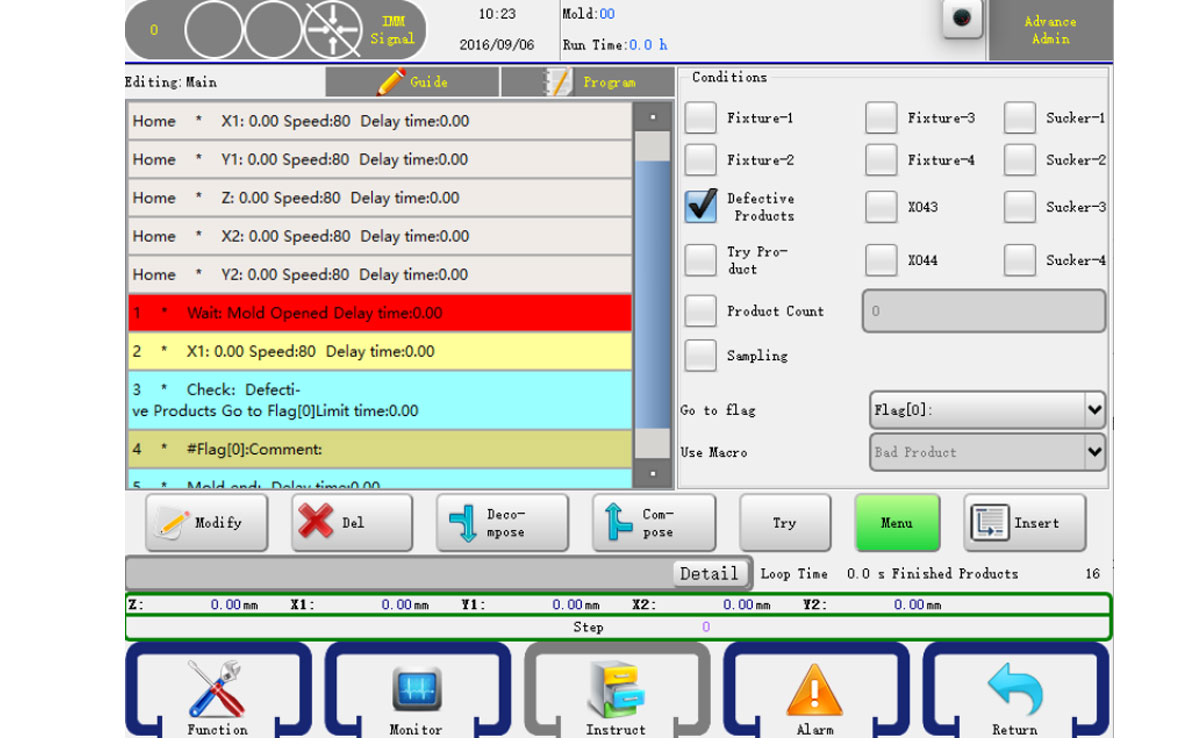
주의: 조건을 사용하려면 프로그램에 주석이 있어야 합니다.
6.2.11 프로그램 수정
수정할 단계를 선택한 후 '수정' 버튼을 클릭하면 아래와 같이 수정 대화 상자가 열립니다.
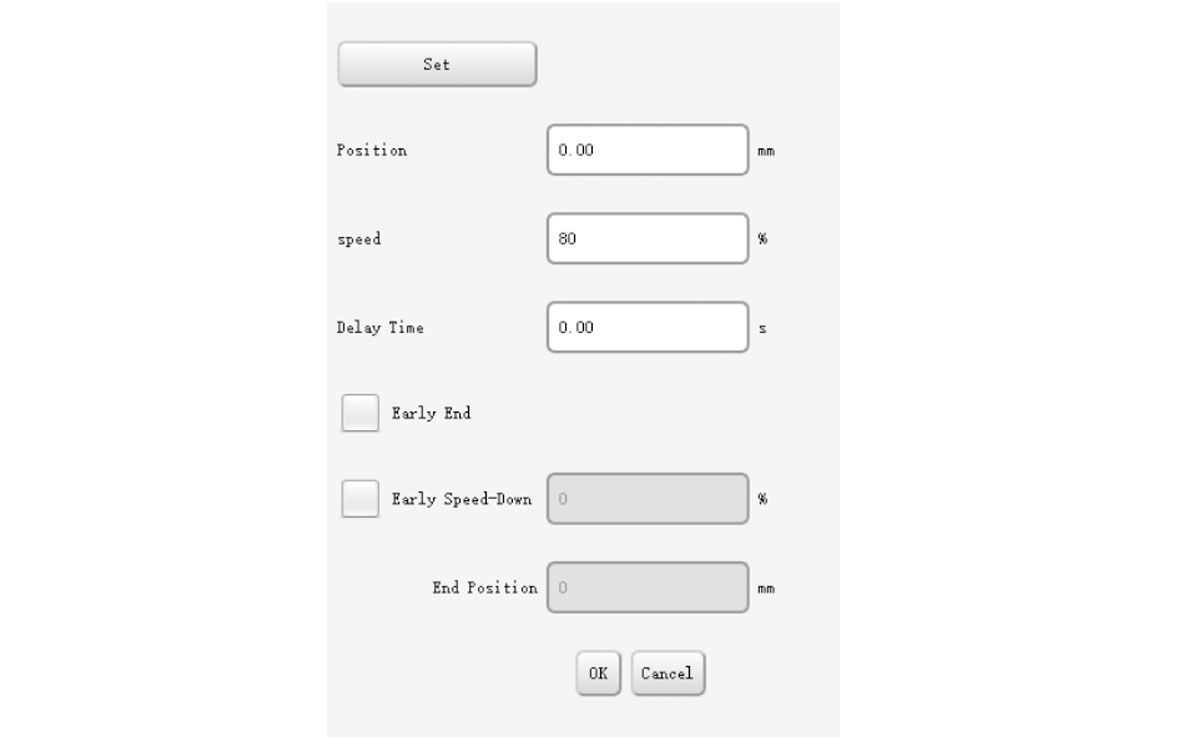
동작 구성을 수정하고 확인을 눌러서 확인할 수 있습니다.
다음 절차는 로봇 프로그래밍을 배우고 연습하는 데 도움이 됩니다. 실제 금형 로봇 프로그램에서는 실제 상황에 따라 서보 축 위치를 설정하고, 사출 성형기에 올바른 시퀀스를 설정하는 것이 중요합니다.
6.3.1 명령
제품을 집어 올리고 꼬리 부분을 공급하는 데 사용되는 절차에서, 로봇은 사출 성형기 상단에 위치하여 금형 개방 신호를 기다립니다. 사출 성형기의 금형이 열리면 로봇 팔이 아래로 내려가 제품과 러너를 집어 올린 후, 러너를 분쇄기에 내리고, 제품을 컨베이어로 내려놓습니다. 컨베이어는 매 금형 사이클마다 이동합니다.
6.3.2 동작
> 자동 모드로 전환합니다.
> 암이 시작 지점으로 이동하여 금형 열림 신호를 기다립니다.
> 제품 흡입 1, 러너 고정 1.
> 암이 사출 성형기 밖으로 나가 금형 닫힘 신호를 활성화합니다.
> 러너를 놓습니다.
> 제품을 컨베이어에 내려놓고 3초 동안 이동합니다.
> 암이 대기 위치로 돌아갑니다.
6.3.3 프로그램
Home X1: 0.0 Speed: 30 Delay time: 0.00
Home Y1: 0.0 Speed: 30 Delay time: 0.00
Home Z: 0.0 Speed: 30 Delay time: 0.00
Home X2: 0.0 Speed: 30 Delay time: 0.00
Home Y2: 0.0 Speed: 30 Delay time: 0.00
Home Vertical Posture Delay time: 0.00
Email: sales06@switek.biz


Chinaplas 2024 - PowerJet은 부스 #4.1D64에서 새로운 사출 성형기와 블로우 성형기를 선보일 예정입니다.
Arge Robotik, 직사각형 삽 2강에 사용되는 새로운 IML 로봇 전시
SWITEK, 금속 라벨이 있는 6개 구멍 컵용 새로운 IML 시스템이 대량 생산 준비 완료
Chinaplas 2024 - VALMO, Acmeplas의 IML 로봇을 사용하여 8개의 캐비티 컵 IML 솔루션 선보임
NPE 2024 -- ARBURG, 비전 제어 기능을 갖춘 BRINK 4 캐비티 컵 IML 솔루션 선보여
Chinaplas 2024 - HWAMDA(HMD), 부스#5.1D52에서 새로운 고속 사출 성형기 전시
Chinaplas 2023에서 본사 금형 쇼케이스 4 캐비티 뚜껑 IML 생산
YIZUMI, Chinaplas 2021에서 MuCell 주입 기술이 적용된 턴키 IML 솔루션 선보여
NPE 2024 -- WITTMANN은 "IT's All WITTMANN"을 시연하기 위한 솔루션을 선보입니다.
Chinaplas 2024 - LK, 부스 #4.1C52에서 새로운 전기 사출 성형기 전시
SWITEK IML에 문의하세요
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
나를 따라와요





HuangYanZheng©Copy Right






