
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
로봇 팔을 작동시키는 것은 제어 시스템과 기계 구조의 협력이며, 전기 보드는 제어 시스템과 로봇 팔의 기계 구조 사이의 매개체입니다. 이 장에서는 로봇 팔에 설치된 보드의 포트 정의에 대해 살펴보겠습니다.
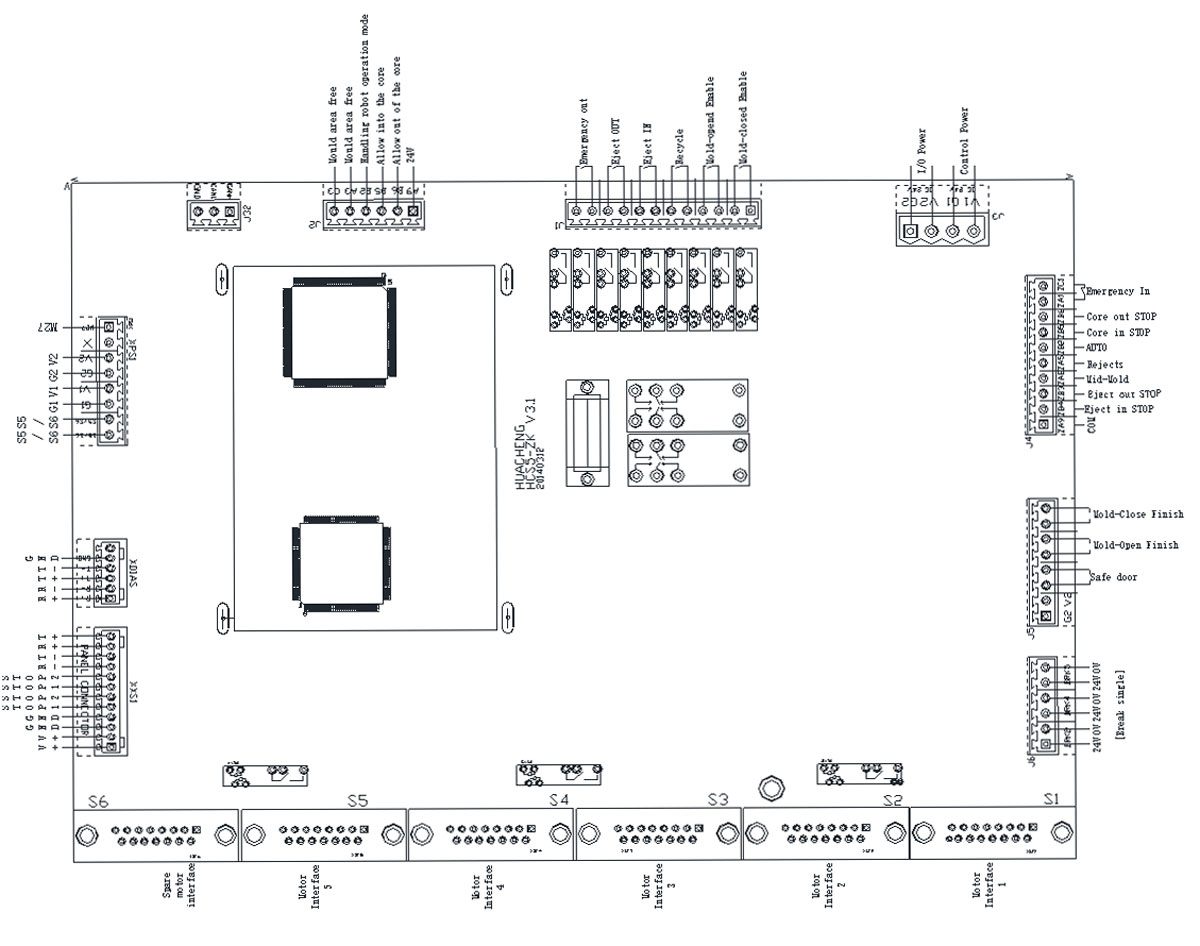
위의 그림은 SWITEK 5축 서보 사출 로봇 팔의 메인 보드의 포트 정의입니다.
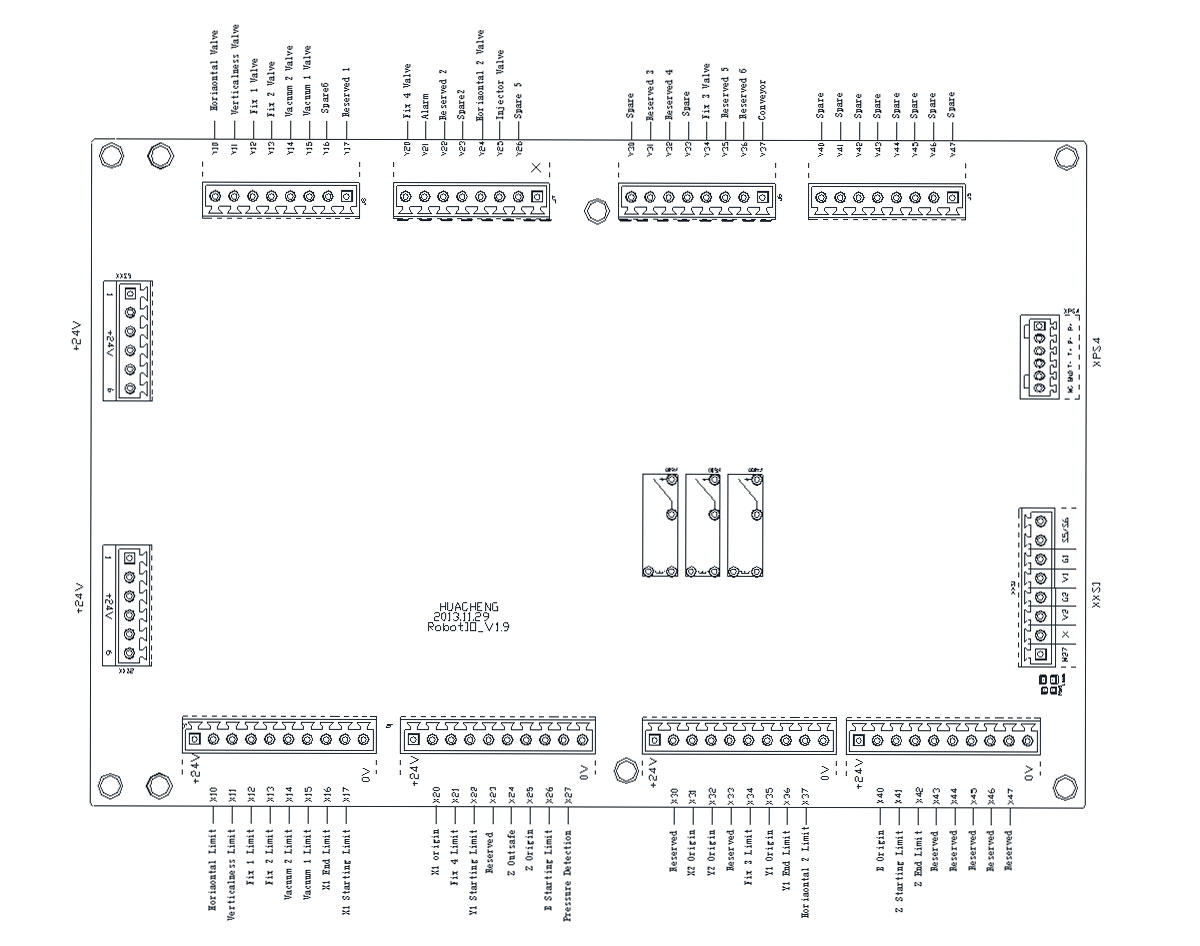
위의 그림은 SWITEK 5축 서보 사출 로봇 팔의 I/O 보드의 포트 정의입니다.
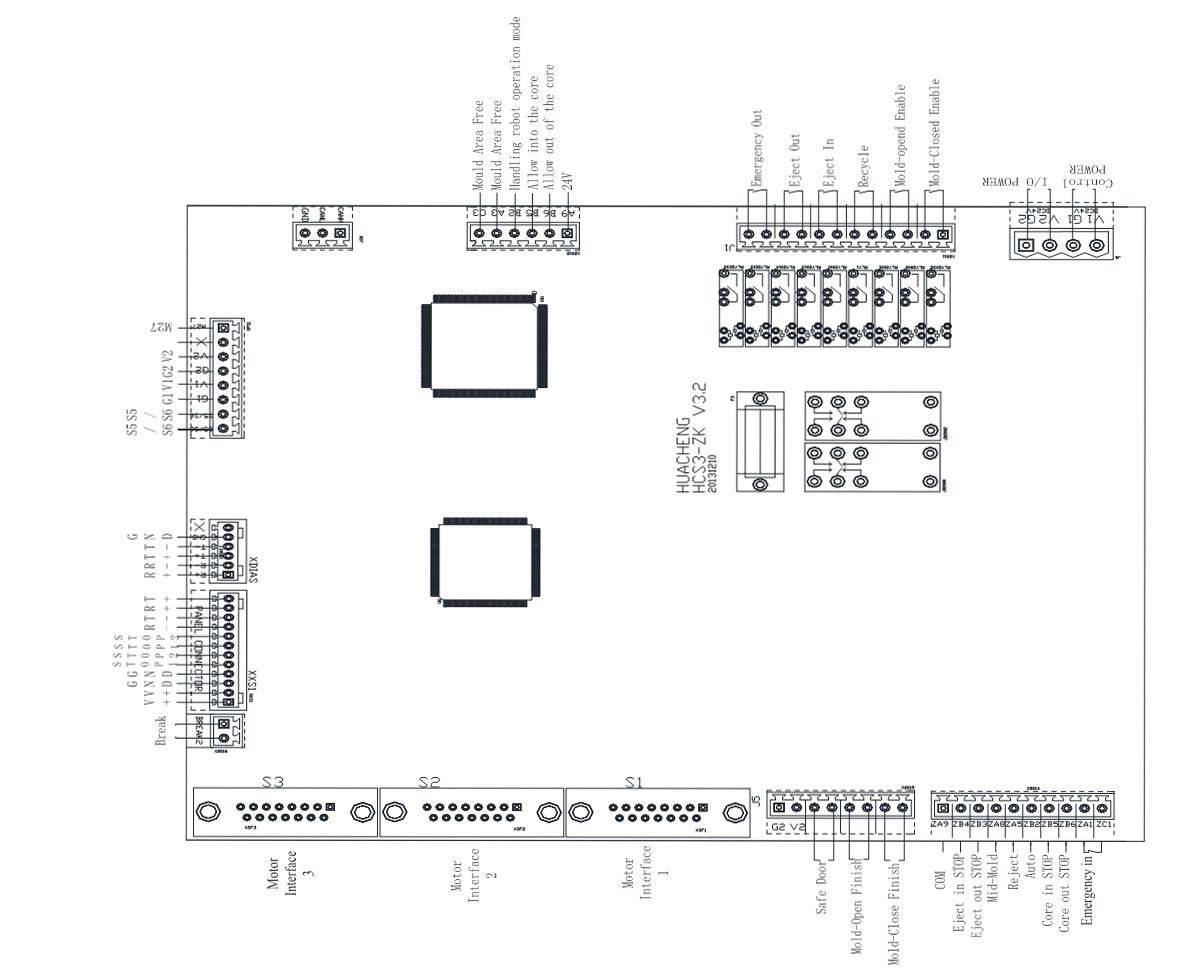
위의 그림은 SWITEK 3축 서보 사출 로봇 팔의 메인 보드의 포트 정의입니다.
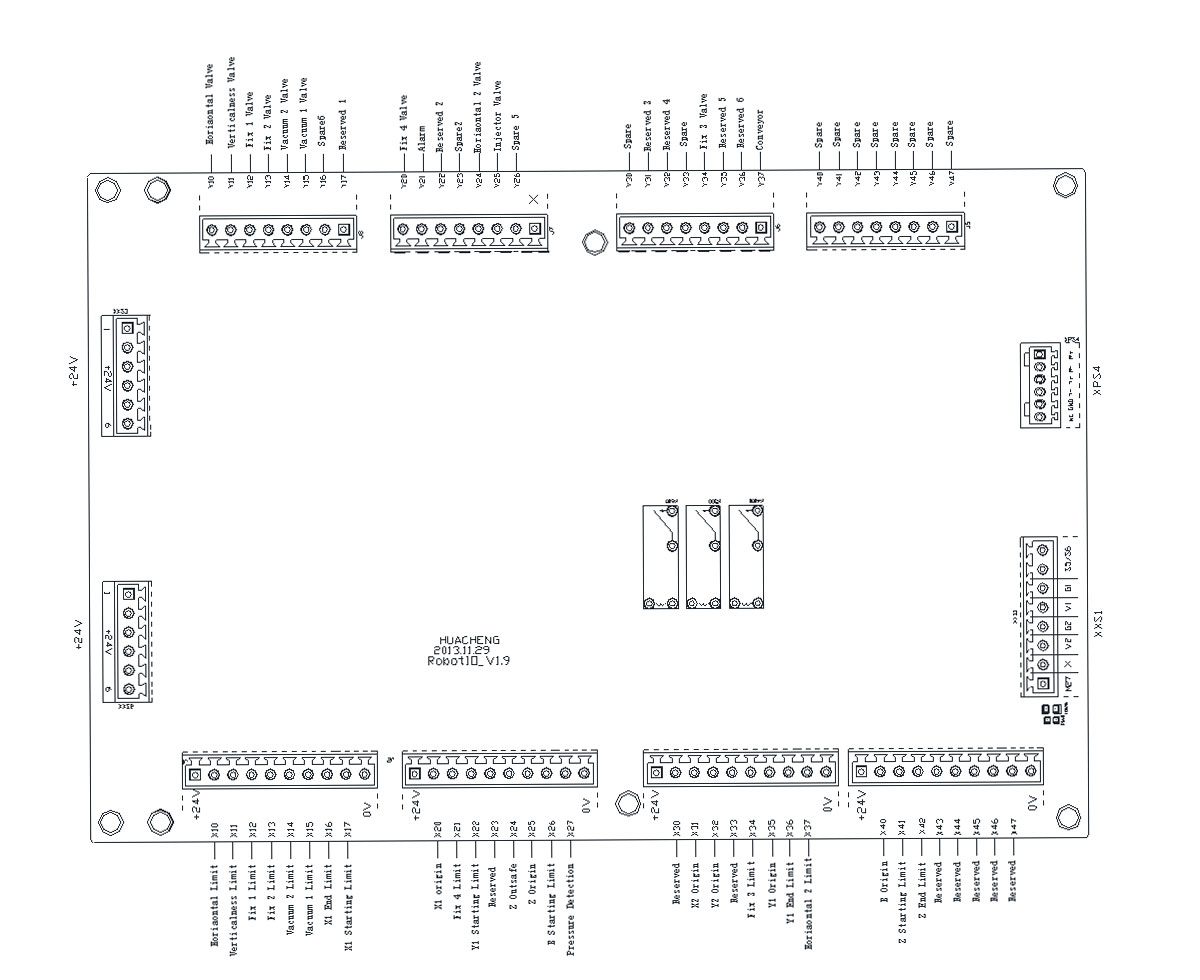
위의 그림은 SWITEK 3축 서보 사출 로봇 팔의 I/O 보드의 포트 정의입니다.
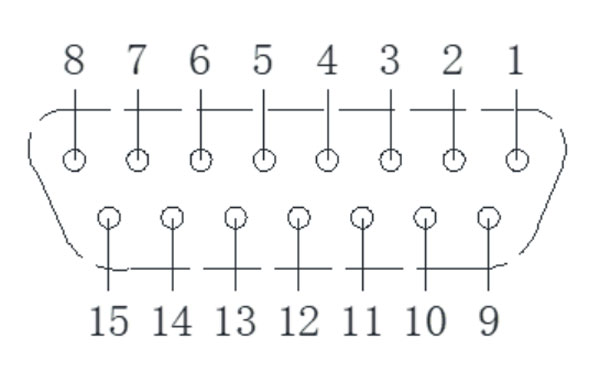
| 핀 번호 | 터미널 정의 | 핀 번호 | 터미널 정의 |
|---|---|---|---|
| 1 | +24V | 9 | 0V |
| 2 | OA+ | 10 | P+ |
| 3 | OA- | 11 | P- |
| 4 | OB+ | 12 | BRAKE |
| 5 | OB- | 13 | N+ |
| 6 | OZ+ | 14 | N- |
| 7 | OZ- | 15 | ALM |
| 8 | SON | 15 |
Email: sales06@switek.biz


Chinaplas 2024가 곧 문을 열었습니다. 준비 되었습니까?
JetEngine은 2/4 캐비티 컵의 측면을 IML에서 생산한 새로운 IML 솔루션으로 보여줍니다.
IML 패키지 - 두 개의 구획으로 구성된 IML 컵을 완벽하게 대체합니다.
SWITEK 새로운 4 캐비티 버거킹 트윈 컵 사이드 엔트리 IML 시스템 가동
BORCHE On Show 660 미국 톤 사출 성형기, NPE 2024
IML 패키지가 친환경 패키지로 간주되는 이유는 무엇입니까?
Sumitomo(SHI) Demag, 고속 박벽 컨테이너 4+4 스택 금형 IML 솔루션 전시
HWAMDA (HMD), Chinapls 2023에서 IML 솔루션을 갖춘 고속 전전동 사출성형기를 선보였습니다.
K Fair 2022, KraussMaffei On Show 물류 플라스틱 케이지를 위한 턴키 솔루션
Brink Automation On Show 다목적 IML 시스템
SWITEK IML에 문의하세요
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
나를 따라와요





HuangYanZheng©Copy Right





