立世为学 自强不息
欢迎来到思为客大学堂
工业机器人的结构分类
工业机器人的结构分类,按机械结构形式可分为:
-
串联结构
- 直角坐标型
- 圆术坐标型
- 极坐标型
- 垂直关节型
- 水平关节型
-
并联结构
- Delta蜘蛛手机器人
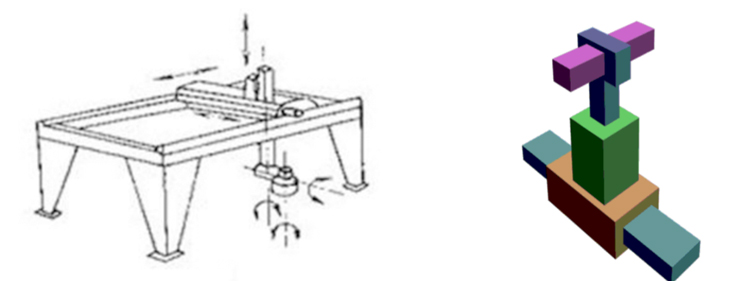
a.直角坐标型
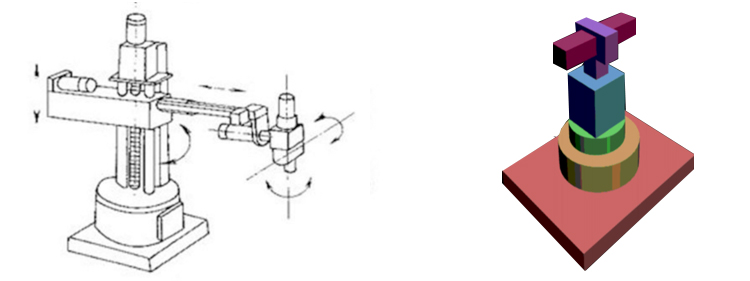
 b.圆柱坐标型
b.圆柱坐标型
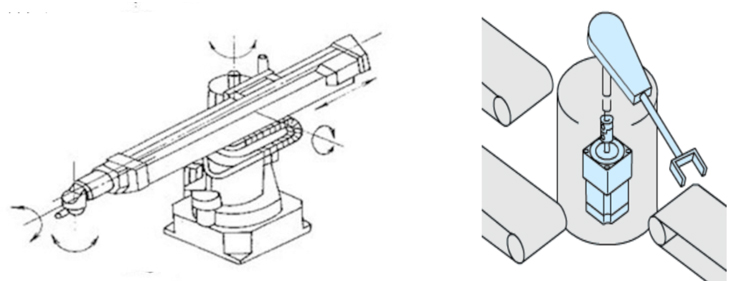
 c.球面坐标型
c.球面坐标型
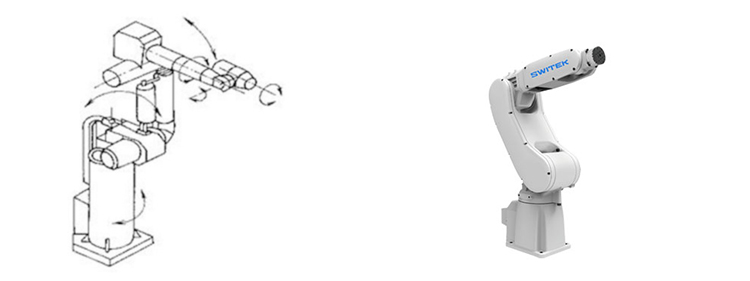
 d.垂直关节型
d.垂直关节型
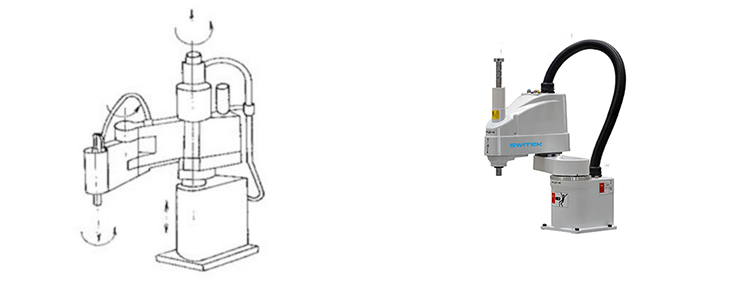
 e.水平关节型机器人
e.水平关节型机器人
特点:直角坐标型机器人由3个相互垂直的移动轴构成,是一类最简单的机器人结构。其位置精度高,控制无耦合、简单,避障性好,但其结构庞大、占地面积较大,无法调节工具姿态,灵活性差。
特点:圆柱坐标型机器人的臂部可作升降、回转和伸缩动作,位置精度仅次于直角坐标型,控制简单,避障性好,但结构也较庞大,难与其他机器人协调工作,两个移动轴的设计较复杂。
特点:球面坐标型机器人的臂部可作回转、俯仰和伸缩动作,其占地面积较小,结构紧凑,位置精度尚可,能与其他机器人协调工作,重量较轻,但避障性差,有平衡问题,位置误差与臂长有关。
特点:垂直关节型机器人由多个铰链连接的关节构成,可做回转、俯仰动作,结构紧凑,灵活性高,占地面积小,工作空间最大,能与其他机器人协调工作,避障性好,是目前应用最多的一类机器人, 但位置精度较低,有平衡问题,控制存在耦合,算法比较复杂。
特点:水平关节型机器人的位置精度高,仅平面运动有耦合,控制比垂直关节型简单,运动灵活性高,占地面积小,铅垂平面刚性好。



