立世为学 自强不息
欢迎来到思为客大学堂
工业机器人的技术参数
工业机器人的主要技术参数一般包括:自由度,定位精度和重复定位精度、运动范围、最大运行速度和承载能力等
-
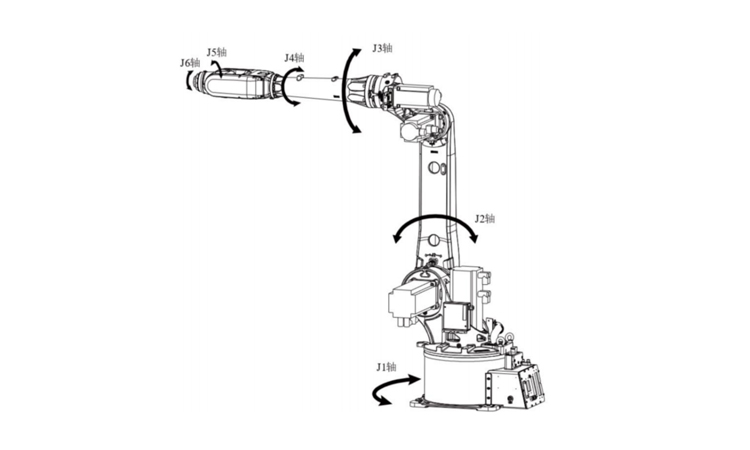
自由度
自由度是指机器人所具有的独立坐标轴运动的数目。机器人的自由度是根据它的用途来设计的,在三维空间中描述一个物体的姿态需要六个自由度。
-
定位精度和重复定位精度
机器人的精度是指机器人的定位精度和重复定位精度。 定位精度:定位精度也是通常讲的绝对精度,是指机器人工具中心点(TCP)实际到达位置和目标位置之间的偏差,一般是毫米级。
重复定位精度:机器人工具中心点(TCP)重复定位同一目标位置的能力,可以用标准偏差这个统计量来表示,一般是0.01毫米级。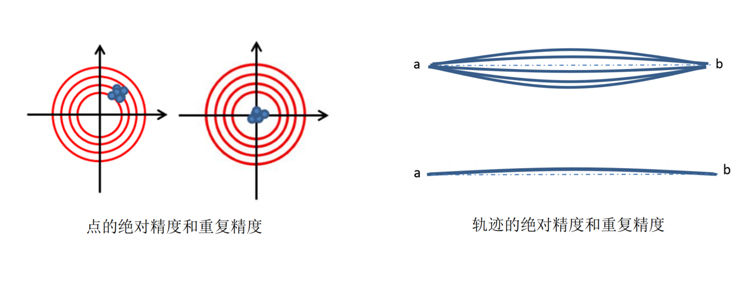
-
运动范围
运动范围就是指机器人的工作区域,机器人手臂末端或手腕中心所能达到的所有点的集合。工作范围的形状和大小是十分重要的,机器人在进行某一个作业的时候,可能会因为存在手部不能 到达的作业死区而不能完成任务。
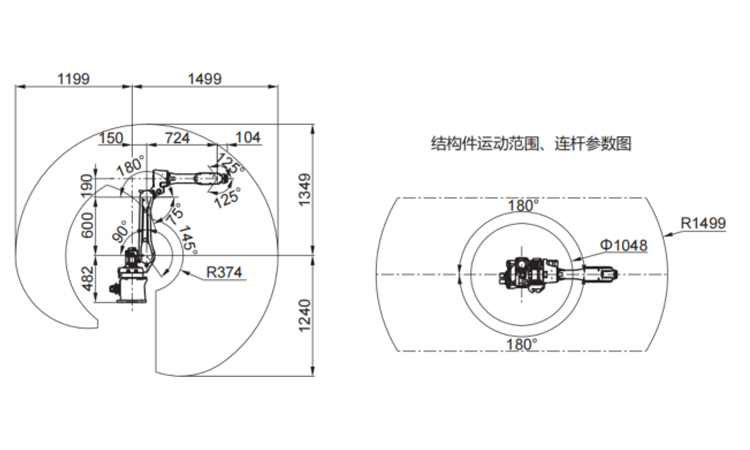 SR61015机器人的运动范围曲线
SR61015机器人的运动范围曲线
-
最大运行速度
通常指机器人各关节及手臂末端的最大速度,运行速度直接影响到工作效率,提高工作速度可以提高工作效率,所以机器人加、减速性能尤为重要,需要保证机器人加速减速的平稳性。
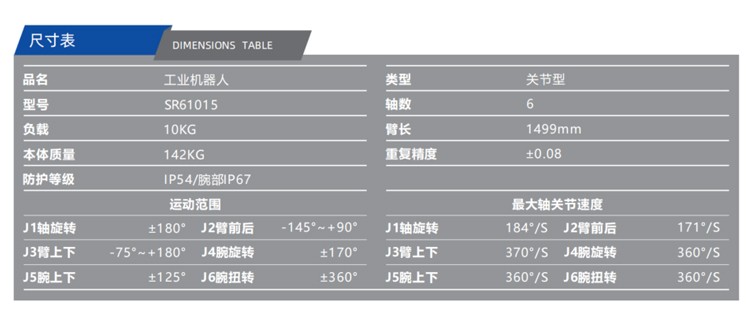 SR61015机器人的各轴运动速度
SR61015机器人的各轴运动速度
-
承载能力
承载能力是指机器人在工作范围内,任何位姿上所能承受的最大质量。机器人载荷不仅取决于负载的质量,还与负载的质心、机器人的运行速度和加速度有关。
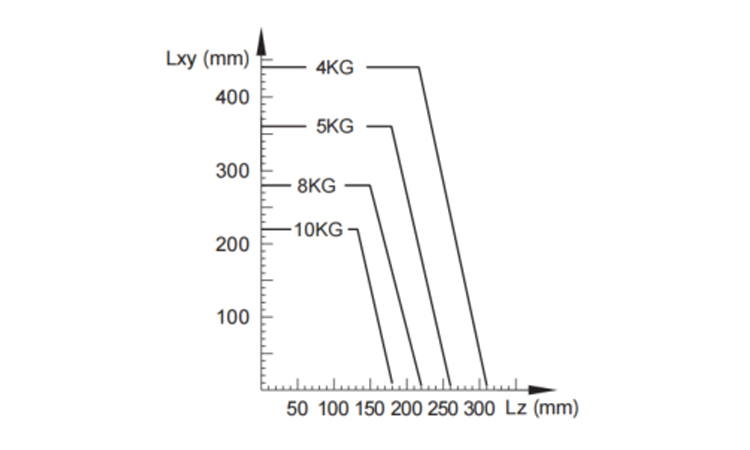 SR61015机器人的负载力矩变化
SR61015机器人的负载力矩变化



