立世为学 自强不息
欢迎来到思为客大学堂
搬运机器人的认知与选型
-
搬运机器人的常见分类
搬运是指用或不用辅助设备,将部件或产品从一个位置移动到另一个位置,以实现期装卸、运输、存储、流通加工等物流活动。搬运机器人按机械结构形式(坐标形式)可分为:
- 直角坐标型搬运机器人
- 圆柱坐标型搬运机器人
- 球坐标型搬运机器人
- 关节型搬运机器人
-
搬运机器人的单元组成
- 搬运机器人
-
搬运系统
- 搬运工具(夹持器)
- 外抓握(外卡式)夹持器:主要应用于长轴类工件的搬运
- 内抓握(内胀式)夹持器:主要应用于以内孔作为抓取部位的工件
- 气吸附夹持器:主要应用于表面坚硬、光滑、平整的轻型工件,如汽车覆盖件、金属板材等。
- 磁吸附夹持器:主要应用于能产生磁感应的工件,对于要求不能有剩磁的工件,吸取后要进行退磁下理,且高温下不可使用
- 托铲式夹持器:主要应用于集成电路制造、半导体照明、平板显示等行业,如真空硅片、玻璃基板的搬运
- 驱动装置
- 搬运工具(夹持器)
- 周边设备
-
视觉系统
基于机器视觉的搬运机器人就是利用高清摄像头实现对散堆工件的视觉成像,然后进行对象识别、对像去除、工件定位、路径规划、碰撞检测、错误验证及其他原本需要搭配特殊传感器或特制夹具才能完成的操作。
机器人视觉传感按照测量方式可分为:
- 2D检测
- 2.5D检测
- 3.5D检测
-
搬运机器人的生产布局
- 地装式(岛式):适用于小型零部件的单、多工序加工场合,如数控加工中心上下料
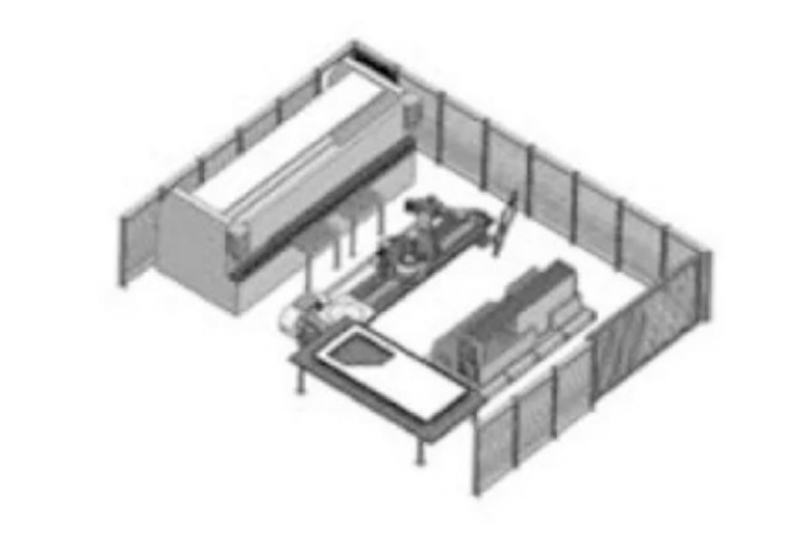
- 地装行走轴式:适用于大型零部件的单、多工序加工,或者小型零部件的单工序、加工周期较长的场合,如钣金折弯上下料。
- 天吊行走轴式:适用于零部件的多工序加工(设备密集摆放)且生产节拍要求较高的场合,如注塑机取件作业。

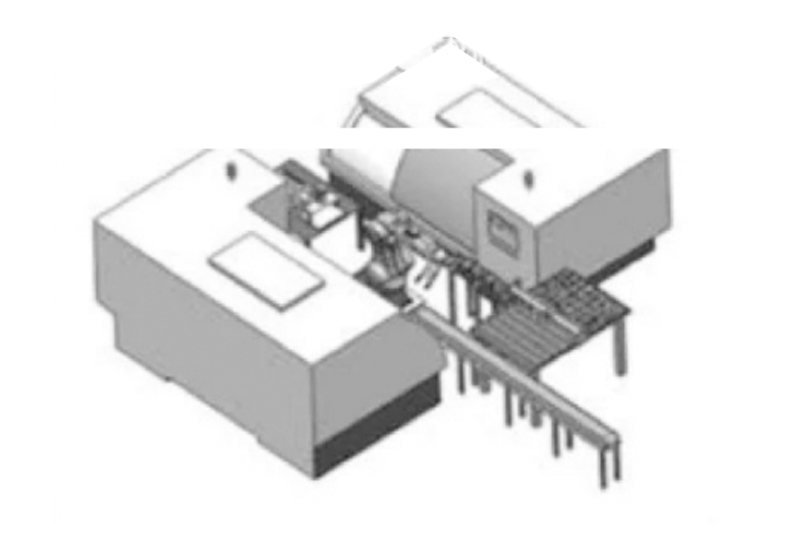
- “一”字型:适用于零部件的单工序、加工周期较短且生产节拍要求较高的场合,如冲压自动化生产线上下料。

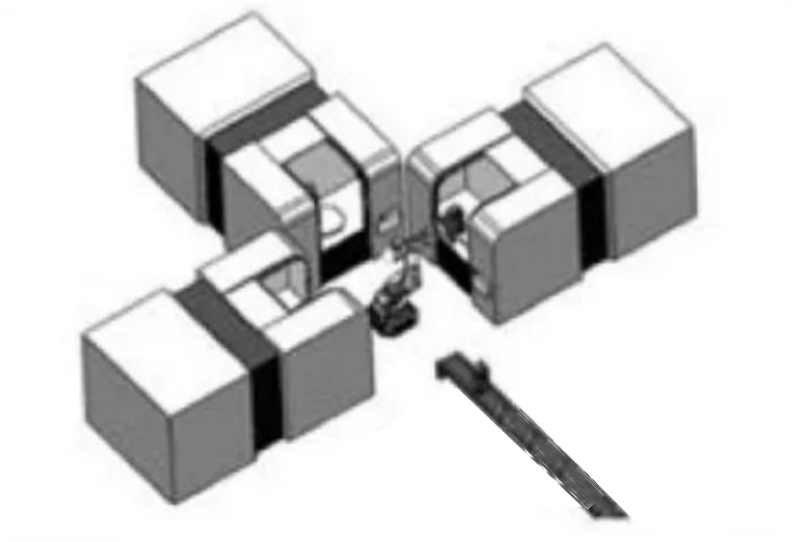
- “品”字形:适用于零部件的多工序加工,或者单工序、加工周期较长的场合,如数控中心上下料。

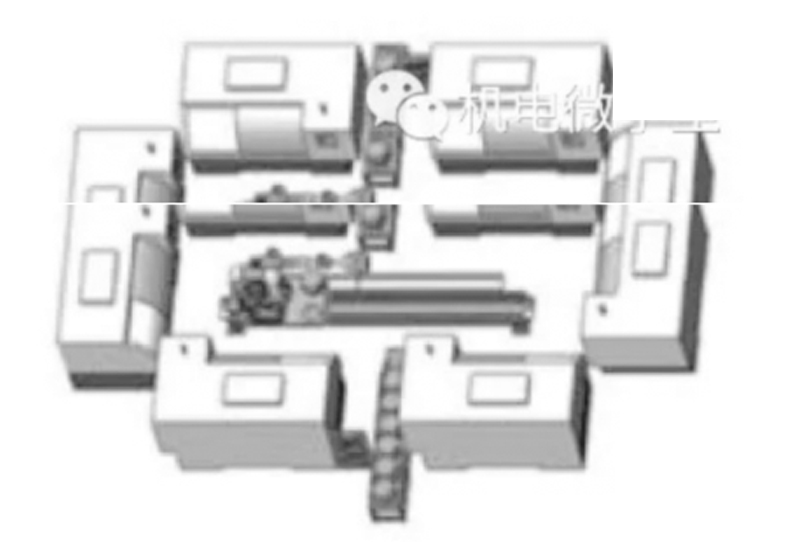
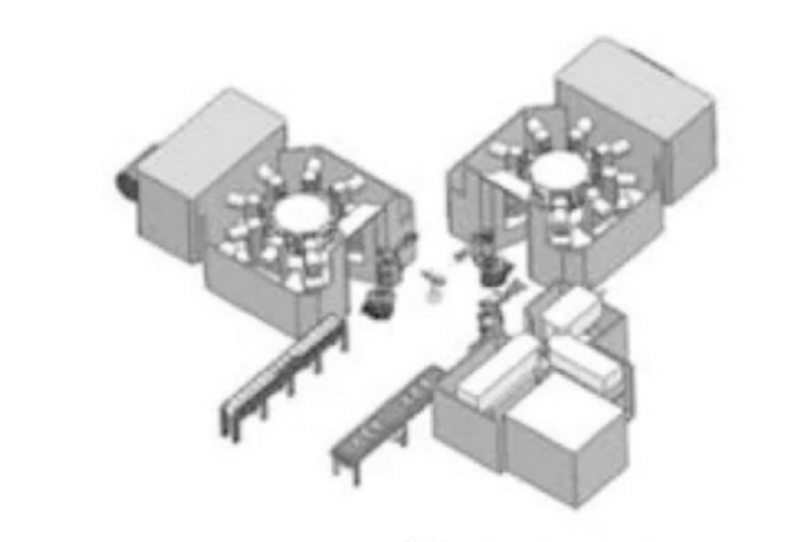
- “环”形:适用于零部件的多工序加工,或者单工序、加工周期长的场合,如数控车床零件装卸。
- 一机一位:适用于零部件的单工序、加工周期较短的场合,如数控车床上下料。

- 一机多位:适用于零部件的单工序、加工周期较长的场合,如数控加工中心的上下料。
- 多机多位:适用于零部件的多工序加工且生产节拍要求较高的场合,如压铸件流通加工。
- 地装式(岛式):适用于小型零部件的单、多工序加工场合,如数控加工中心上下料



