立世为学 自强不息
欢迎来到思为客大学堂
分拣机器人的认知与选型
-
分捡机器人常见分类
分捡机器人按机械结构类型(坐标型式)可分为:
- 直角坐标型分捡机器人
- (垂直)关节型分拣机器人
- 平面关节型(SCARA)分拣机器人
- 并联式(DELTA)分拣机器人
-
分拣机器人单元组成
- 分拣机器人:由操作机和控制器两大部份构成。
- 分捡系统:分拣系统作为机器人完成产品或包装件分拣、整列、装箱等操作的关键装备,主要由分拣工具(末端执行器或夹持器)及其动力装置组成。
- 传感系统
基于机器视觉的分拣机器人是通过视觉传感器获取抓取对象的图像,然后将图像传送至处理单元(图像处理模块)进行数字化处理,再由判断分析决策模块根据图像的颜色、边缘、形状等特征 对目标进行识别与定位,进而根据判别结果来引导控制机器人的动作,实现对目标的在线跟踪和动态抓取。
根据工业相机的安装方式,机器人视觉系统可分为EYE-IN-HAND 和 EYE-TO-HAND两种方式。机器视觉产品根据工业相机是否具有图像处理功能还分为两类,一类称为PC-BASED,另一类称为SMART-CAMERA. - 周边设备
-
分拣机器人的生产布局
-
布局类型:点式分拣
布局特点:一台分拣机器人安装在包装流水线的上方或侧面,通常对一条物料(品)输送线进行在线高速分拣、装箱等操作,具有占地面积小、投资成本低等特点。
适用场合:流水线吞吐量较低的场合。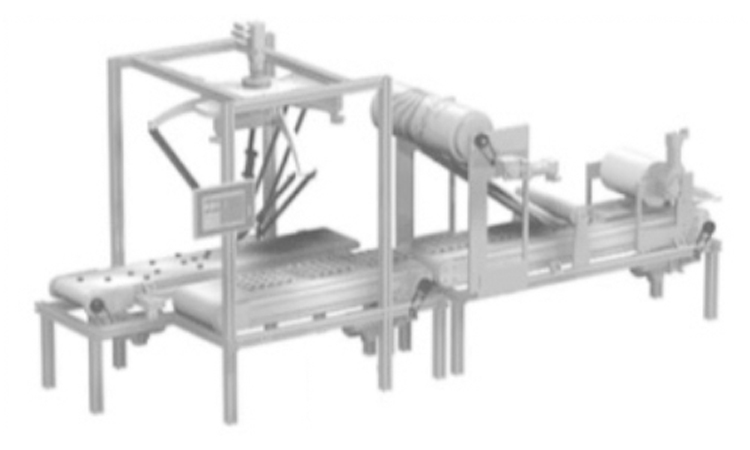
-
布局类型:线式分拣
布局特点:两台或多台机器人按线性串列布局安装在一条包装生产线的上方或侧而,以双机或多机联动的方式实现在线高速分拣、装箱等,具有人工操作少、应用柔性大、自动化程度高等特点。
适用场合:流水线吞吐量较高的场合。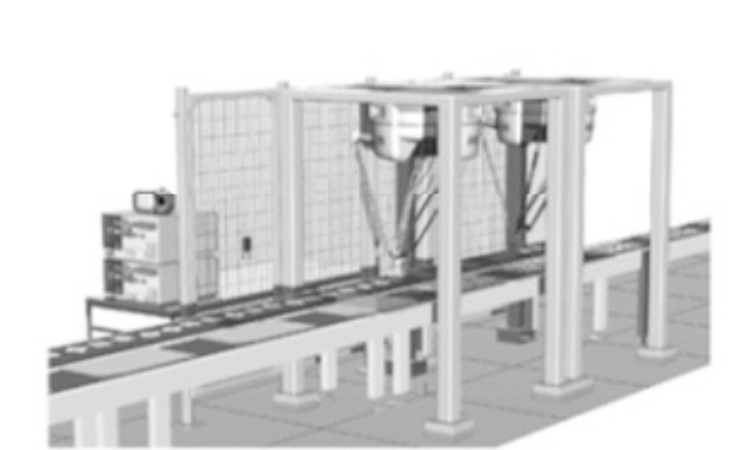
-
布局类型:面式分拣
布局特点:两台或多台分拣机器人安装在多条并行排列的包装生产线的上方或侧面,可实现区域集中的分拣、装箱作业,具有场地使用效率高、自动化程度高、人工操作少和便于管理等特点。
适用场合:流水线吞吐量较高的场合。
-
布局类型:一进一出
布局特点:一台或多台分拣机器人安装在一条包装生产线的上方或侧面,将分拣、装箱完成的产品沿着一条输送线输出,具有占地面积小、投资成本低等特点。
适用场合:产品种类单一、流水线吞吐量较低的场合。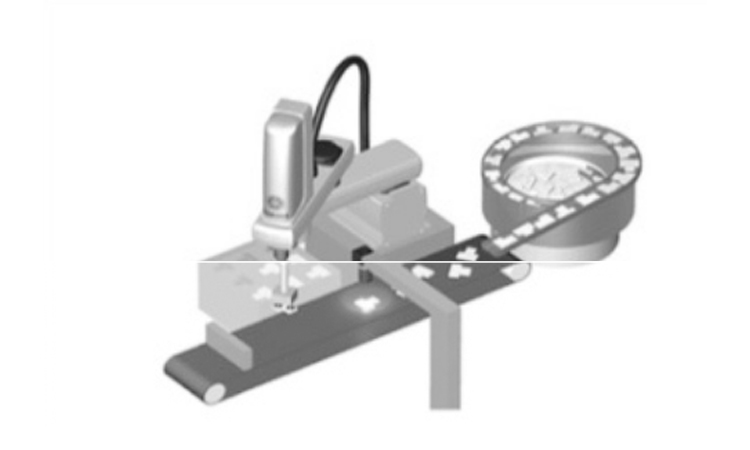
-
布局类型:一进多出
布局特点:一台或多台分拣机器人安装在一条包装生产线的上方或侧面,将分拣、装箱完成的产品沿着两条或多条输送线输出,具有包装效率高、人工操作少、自动化程度高等特点。
适用场合:产品种类多样,流水线吞吐量较多的场合。
-
布局类型:多进多出
布局特点:一台或多台分拣机器人安装在多条并行排列的包装生产线的上方或侧面,完成分拣、装箱的产品沿同一条输送线输出,具有场地使用效率高、投资成本低等特点。
适用场合:产品类型丰富,流水线吞吐量较高的场合。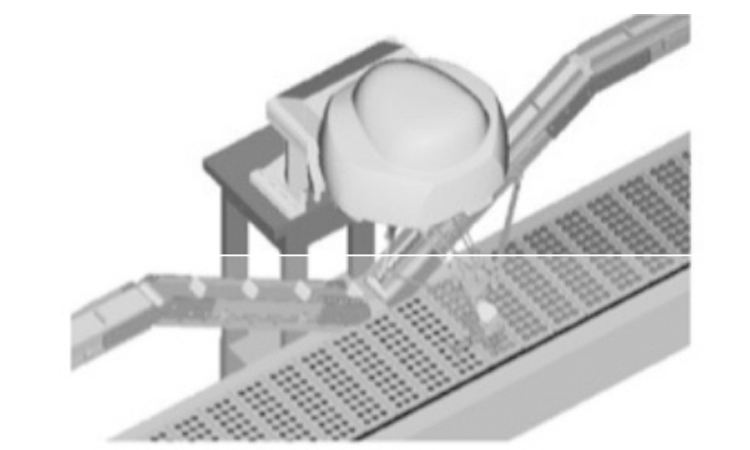
-
布局类型:一线一机
布局特点:单台分拣机器人安装在一条包装生产线的上方或侧面,完成物料(品)的分拣、装箱等工作,具有占地面积小、投资成本低等优点。
适用场合:流水线吞吐量较低的场合。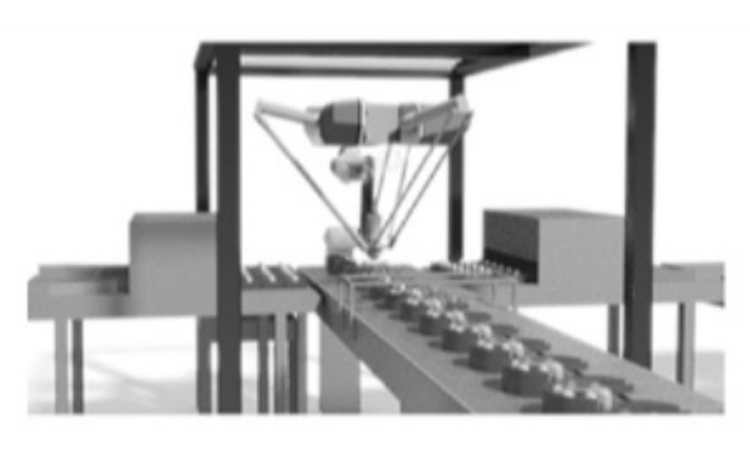
-
布局类型:一线多机
布局特点:多台分拣机器人按线性串列布局安装在一条包装生产线的上方或侧面,共同完成物料(品)的分拣、装箱等工作,具有自动化程度高、生产效率高等特点。
应用场合:流水线吞吐量较高的场合。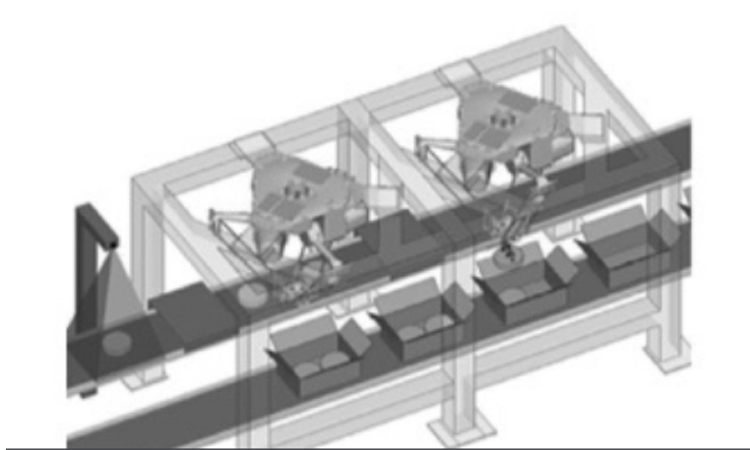
-
布局类型:点式分拣



