立世为学 自强不息
欢迎来到思为客大学堂
机器人的五个坐标系
坐标系是为确定机器人的位置和姿态而在机器人或空间上进行定义的位置指标系统。坐标系分为关节坐标系和直角坐标系。
-
关节坐标系
关节坐标系是设定在机器人关节中的坐标系。关节坐标系中机器人的位置和姿态,以各关节底座侧的关节坐标系为基准而确定。 下图1中的关节坐标系的关节值为:
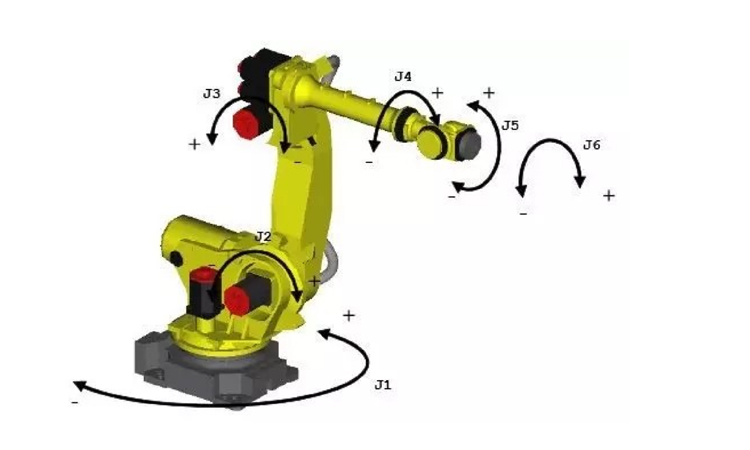 图1
图1
- J1:0°
- J2:0°
- J3:0°
- J4:0°
- J5:0°
- J6:0°
-
直角坐标系
直角坐标系中的机器人的位置和姿态,通过从空间上的直角坐示系原点到工具侧的直角坐标系原点(工具中心点)的坐标值 x, y, z和空间上的直角坐标系的相对X轴、Y轴、Z轴周围的工具侧的直角坐 标系的回转角w,p,r予以定义。下图2为(w, p, r)的含义。
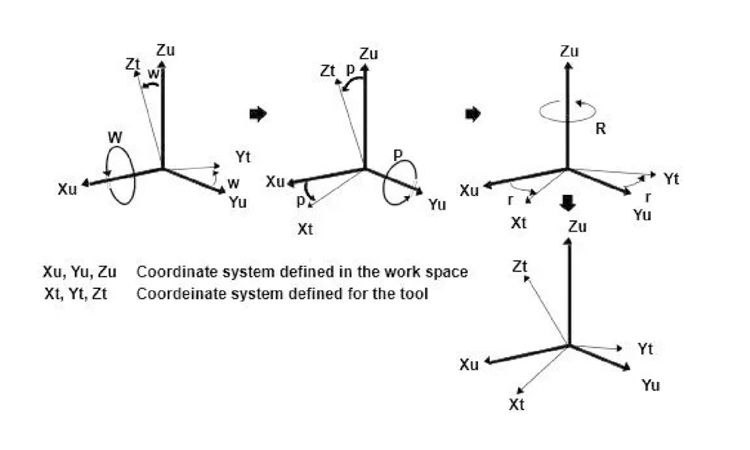 图2
图2
-
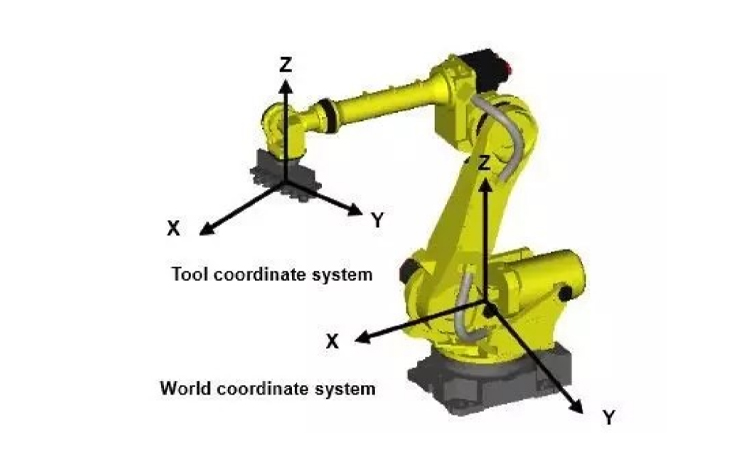
世界坐标系
世界坐标系是被固定在空间上的标准直角坐标系,其被固定在由机器人事先确定的位置。用户坐标系是基于该坐标系而设定的,它用于位置数据的示教和执行。有关各机器人(R系列/M系列/ARC MATE/LR MATE) 的世界坐标系原点位置的大致标准为:
- 顶吊安装机器人、M-710iC以外:在J1轴上水平移动J2轴而交叉的位置。
- 顶吊安装机器人、M-710iC:J1轴处于0位时,离开J4轴最近的J1轴上的点。
-
工具坐标系
这是用来定义工具中心点(TCP)的位置和工具姿态的坐标系。工具坐标系必须事先进行设定,在没有定义的时候,将由默认工具坐标系来替代该座标系。
-
用户坐标系
这是用户对每个作业空间进行定义的直角坐标系。它用于位置寄存器的示教和执行、位置补偿指令的执行等。在没有定义的时候,将由世界坐标系来替代该坐标系。



