
sales06@switek.biz

+86 186 5927 5869

저희 채널을 구독해주세요
sales06@switek.biz
+86 186 5927 5869
저희 채널을 구독해주세요
여기서 말하는 "모니터"는 로봇 팔의 작동 상태를 명확하게 파악할 수 있는 곳입니다. 모니터 페이지에서는 로봇 팔, EOAT, 사출 성형기, 서보 모터 및 IML 로봇의 제어 시스템의 신호를 확인하여 시스템 고장 지점을 신속하게 진단할 수 있습니다.
 아이콘을 클릭하면 다음 페이지, 즉 모니터링 페이지가 나타납니다.
아이콘을 클릭하면 다음 페이지, 즉 모니터링 페이지가 나타납니다.

| 아니요 | 이름 | 기능 |
|---|---|---|
| (1) | 로봇/지그/IMM | IO는 카테고리를 표시하며, 클릭하면 해당 신호 페이지로 빠르게 전환됩니다. |
| (2) | 페이지 | 입출력 페이지로 전환하려면 클릭하세요. |
| (3) | IO 디스플레이 | 모든 전류 입력 및 출력 지점의 실시간 ON/OFF 표시. |
| (4) | 드라이브 모니터링 | 각 축 서보 모터의 속도, 토크, 부하율 및 편차를 실시간으로 표시합니다. |
| (5) | 내부 모니터링 | 내부 I/O 상태를 실시간으로 표시합니다. |
(1) 또는 (2)를 사용하여 IO 표시를 전환하고 전면 조명이 켜져 신호가 켜져 있음을 나타냅니다.
3.5.2 드라이브 모니터링
실시간 값
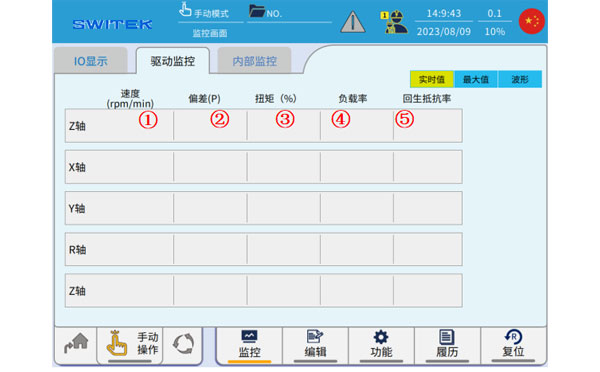
| 아니요 | 이름 | 기능 |
|---|---|---|
| (1) | 속도(rpm/min) | 각 축의 작동 속도를 실시간으로 표시합니다. |
| (2) | 편차(P) | 각 축의 편차를 실시간으로 표시합니다. |
| (3) | 토크(%) | 각 축의 토크를 실시간으로 백분율로 표시합니다. 서보 모터의 순간 토크는 정격 토크의 최대 300%까지 도달할 수 있습니다. |
| (4) | 부하율 | 각 축의 작동 부하율을 실시간으로 표시합니다. (최대 100%) |
| (5) | 회복력 저항률 | 부활 저항 부하율을 실시간으로 표시합니다. |
최고

| 아니요 | 이름 | 기능 |
|---|---|---|
| (1) | 전진 최대 속도 | 각 축이 양의 방향으로 움직일 때의 최대 속도를 기록한 것입니다. |
| (2) | 최대 속도 음수 | 각 축이 음의 방향으로 움직일 때의 최대 속도 기록입니다. |
| (3) | 양의 최대 편차 | 각 축의 양의 방향으로의 최대 편차를 기록합니다. |
| (4) | 최대 편차의 음수 | 각 축의 음의 방향으로의 최대 편차 기록. |
| (5) | 전진 최대 토크 | 각 축이 양의 방향으로 움직일 때의 최대 토크 기록입니다. |
| (6) | 최대 토크의 음수 값 | 각 축이 음의 방향으로 움직일 때의 최대 토크 기록. |
| (7) | Reset | 이전에 기록된 최대값이 초기화됩니다. |
파형
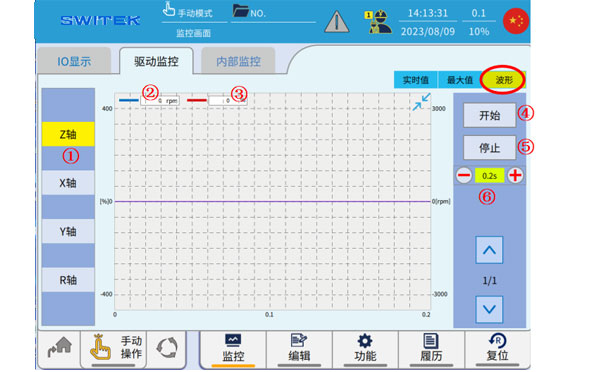
| 아니요. | 이름 | 기능 |
|---|---|---|
| (1) | 축 선택 | 표시할 축을 선택하려면 클릭하십시오. |
| (2) | 토크(%) | 파란색 파형 곡선은 토크의 변화를 보여줍니다. 서보 모터의 순간 토크는 정격 토크의 최대 300%까지 도달할 수 있습니다. |
| (3) | 속도(rpm/min) | 붉은색 파형 곡선은 속도의 변화를 보여줍니다. |
| (4) | 시작 | (1) 축을 선택한 후 "시작"을 클릭하여 파형 샘플링을 시작합니다. |
| (5) | 멈추다 | 정지 파형 샘플링 |
| (6) | 파형은 스케일을 표시합니다. | "+"와 "-" 버튼을 클릭하여 표시된 파형을 확대/축소할 수 있습니다. |
3.5.3 내부 모니터
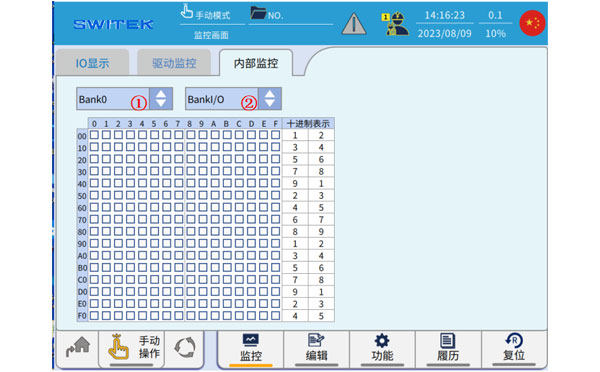
"내부 모니터링"은 컨트롤러의 내부 플래그 위치의 ON/OFF 모니터링을 의미하며, 이는 5개의 빈 *2개 단위로 나뉘어 총 10개 영역으로 구성되고, 뱅크와 유닛 간의 전환은 (1)과 (2)를 통해 완료됩니다.
Email: sales06@switek.biz


SWITEK IML에 문의하세요
sales06@switek.biz
+86 186 5927 5869

둥관, 광둥, 중국
HuangYanZheng©Copy Right





