
sales06@switek.biz

+86 186 5927 5869

저희 채널을 구독해주세요
sales06@switek.biz
+86 186 5927 5869
저희 채널을 구독해주세요
IML 로봇의 기계적 매개변수 설정에는 기능 유닛의 모듈 선택, 축의 기계적 매개변수, 서보 모터 등이 포함되어 IML 로봇이 안전하고 효율적으로 작동하도록 보장합니다.
모델 선택

| 아니요. | 이름 | 기능 |
|---|---|---|
| (1) | 모델 선택 | 여기를 클릭하여 해당 모드 이름을 선택하십시오. |
| (2) | 구하다 | (1) 모델을 선택한 후 "저장"을 클릭하여 작업을 확인합니다. |
| (3) | 선택한 모델에 대한 정보가 표시됩니다. | 이 정보는 모델들을 구분하는 데 도움이 되도록 표시됩니다. (모델의 이 정보 부분은 정확성을 유지하기 위해 프로덕션 과정에서 계속 관리되어야 합니다.) |
위의 작업, 즉 모델 선택 및 저장 작업은 모델 내용 입력 완료 후 즉시 적용되지 않으며, 기계적 매개변수 및 서보 매개변수를 초기화하고 저장한 후 시스템을 재시작해야 적용됩니다.
기계적 매개변수

| 아니요. | 이름 | 기능 |
|---|---|---|
| (1) | 초기화 | 클릭하면 모델 파일의 기계적 매개변수의 초기 데이터를 읽고 (4)의 디스플레이에 피드백합니다. |
| (2) | 구하다 | 기존 변경 사항 저장 |
| (3) | 페이지 | 매개변수를 위아래로 스크롤할 수 있습니다. |
| (4) | 기계적 매개변수 내용 |
|
위의 매개변수 변경 사항은 즉시 적용되지 않고 저장해야 하며, 시스템이 재시작된 후에야 적용됩니다. 이 점에 유의하시기 바랍니다.
드라이브 파라미터

| 아니요. | 이름 | 기능 |
|---|---|---|
| (1) | 초기화 | 클릭하면 모델 파일의 드라이브 매개변수의 초기 데이터를 읽고 (4)의 디스플레이에 피드백합니다. |
| (2) | 구하다 | 기존 변경 사항을 저장합니다. |
| (3) | 페이지 | 매개변수를 위아래로 스크롤할 수 있습니다. |
| (4) | 드라이브 파라미터 콘텐츠 | 각 드라이버 매개변수를 편집하고 표시할 수 있습니다. |
드라이브 매개변수 설정 방법 안내:
| 아니요. | 이름 | 효과 | 초기값 | 범위 | 단위 | 설정의 핵심은 | |
|---|---|---|---|---|---|---|---|
| PA1-02 | INC/ABS 시스템 선택 | 재부팅 | 0 | 0~1 | "0"은 증분형 모터이고, "1"은 절대 제어형 모터입니다. | ||
| PA1-04 | 회전 방향 | 재부팅 | 0 | 0~1 | 모터가 잘못된 방향으로 회전할 때 조정하십시오. | ||
| PA1-13 | 튜닝 모드 | 실시간 | 0 | 0~2 | 0은 자동, 1은 반자동, 2는 수동을 나타냅니다. 로봇은 출고 시 1로 설정되어 있습니다. | ||
| PA1-14 | 부하-토크 비율 | 실시간 | 23.0 | 0.0~300 | 타임스 | ||
| PA1-15 | 튜닝 게인 | 실시간 | 7 | 1~40 | |||
| PA1-27 | 전진 토크 제한 값 | 실시간 | 300 | 0~500 | |||
| PA1-28 | 음의 토크 제한값 | 실시간 | 300 | 0~500 | |||
| PA1-52 | S acc/dcc 설정 | S acc/dcc 설정 | 0.0 | 0.0~1000.0 | |||
| PA1-54 | 고정된 수의 위치 명령 응답 | 실시간 | 30.0 | 0.00~250.00 | |||
| PA1-55 | 위치 링 게인 1 | 실시간 | 17 | 1~2000 | |||
| PA1-56 | 스피드 링 게인 1 | 실시간 | 5 | 1~2000 | |||
| PA1-58 | 피드백 이득 1 | 실시간 | 0.000 | 0.000~1.500 | |||
| PA1-59 | 토크 필터링 | 재부팅 | 0.00 | 0.00~20.00 | |||
| PA1-70 | 노치 필터 모드 | 실시간 | 1 | 0~1 | 값이 0일 경우, 자동 감지 1은 설정된 값에 대해 유효합니다. | ||
| PA1-71 | 노치 1 주파수 번호 | 실시간 | 134 | 10~4000 | |||
| PA1-72 | 노치 1 감쇠 | 실시간 | 1 | 0~40 | |||
| PA1-73 | 노치 1 너비 | 실시간 | 2 | 0~3 | |||
| PA1-74 | 노치 2 주파수 번호 | 실시간 | 53 | 10~4000 | |||
| PA1-75 | 노치 2 감쇠 | 실시간 | 1 | 0~40 | |||
| PA1-76 | 노치 2 너비 | 실시간 | 2 | 0~3 | |||
| PA1-78 | 제동 반공진의 주파수 번호 0 | 실시간 | 7.0 | 1~300.0 | Hz | 진동 억제는 정지 시에 효과적이며, 설정 전에 실제 진동을 측정해야 합니다. | |
| PA1-79 | 브레이크 진동 관성비 | 실시간 | 0 | 0~80 | 이 값이 0으로 설정되면 PA1-78은 유효하지 않게 되고, 1로 설정되면 PA1-78은 유효하게 됩니다. | ||
| PA1-80 | 제동 반공진의 주파수 번호 1 | 실시간 | 8.0 | 1~300.0 | Hz | 진동 억제는 정지 시에 효과적이며, 설정 전에 실제 진동을 측정해야 합니다. | |
| PA1-81 | 브레이크 진동 관성비 | 실시간 | 0 | 0~80 | 이 값이 0으로 설정되면 PA1-80은 유효하지 않고, 1로 설정되면 PA1-80은 유효합니다. | ||
| PA1-94 | 토크 필터 모드 | 재부팅 | 0 | 0~1 | 값을 0으로 설정하고 토크 필터링을 사용하지 마십시오. | ||
| PA2-64 | 브레이크 액션 타임 | 실시간 | 0 | 0.00~99.9 | Sec | ||
| PA2-65 | 역행 저항 선택 | 재부팅 | 1 | 0~1 | 재생 저항이 연결된 경우 1로 설정하고, 연결되지 않은 경우 0으로 설정합니다. | ||
| PA2-69 | 검출된 값 대비 편차 | 실시간 | 15.0 | 0.1~100.1 | Rev | ||
| PA3-79 | 역행 임피던스 값 설정 | 실시간 | 30.0 | 3.9~160.0 | Ω | 재생 저항의 값이 설정됩니다. | |
| PA3-80 | 리스폰 임피던스 전력 설정 | 실시간 | 40 | 1~5000 | W | 소급적 저항 용량 설정 | |
간편한 설정 및 튜닝 모드

| 아니요. | 이름 | 기능 |
|---|---|---|
| (1) | 축 선택 | 작업할 축을 선택하려면 클릭하십시오. |
| (2) | 오토튠 | 기계를 공장에서 출고하기 전에 조정할 때, 이 모드에서 구동 매개변수를 추론할 수 있습니다. |
| 반자동 튜닝 | 반자동 튜닝 모드에서는 일부 매개변수는 고정되고, 일부 매개변수는 미세 조정됩니다. | |
| 수동 튜닝 | 모든 드라이브 매개변수는 고정되어 있습니다. | |
| (3) | 값을 설정합니다. | 현재 사용 중인 조정된 이득, 관성 대 토크 비율. |
| (4) | 계산된 값 | 현재 계산에서 도출된 값입니다. |
| (5) |  | 계산된 값 내용을 설정 값에 적용합니다. |
| (6) |  | "설정 값"의 내용을 "계산 값"에 적용합니다. |
| (7) | 구하다 | 현재 드라이버 매개변수를 수정하고 저장합니다. |
자동 모드에서는 이 인터페이스에서 각 축의 튜닝 모드를 전환하고 관성-토크 비율 및 튜닝 게인을 수정하여 설정값의 작동 효과를 실시간으로 관찰하고 보다 합리적인 파라미터 설정을 찾을 수 있습니다.
자동 튜닝 모드로 설정하면 PA1-14 관성-토크 비율 파라미터가 실시간으로 측정됩니다.
자동 튜닝 모드의 주요 기능은 디버깅 초기 단계에서 적절한 구동 매개변수를 알 수 없을 때 주행 효과에 따라 값을 자동으로 조정하여 주행 효과가 양호하고 안정될 때까지, 그리고 관성-토크 비율 값이 일정해지는 경향을 보일 때까지 조정하는 것입니다.
작동 효과가 안정되면 반자동 튜닝 모드로 전환하고, 수동으로 파라미터를 설정한 후 저장하고 전원을 끄십시오. 그리고 파라미터가 적용되기 전에 다시 전원을 켜십시오. 반자동 튜닝 모드에서는 "관성 토크 비율"과 같은 주요 파라미터는 고정되고, 일부 서보 파라미터는 원활한 작동을 위해 실시간으로 조정됩니다.
"수동 튜닝 모드"로 설정하면 모든 서보 파라미터가 고정됩니다. 이 모드에서는 파라미터 설정에 높은 정밀도가 요구됩니다.
간편 설정 - 노치 필터 설정

| 아니요. | 이름 | 기능 |
|---|---|---|
| (1) | 축 선택 | 작업할 축을 선택하려면 클릭하십시오. |
| (2) | 적응형 필터링 | 적응형 필터링 기능 켜기/끄기 전환. |
| (3) | 노치 필터링 관련 매개변수 | 노치 필터링 기능과 관련된 다양한 매개변수. |
서보 모터가 켜진 상태 또는 작동 중에 날카로운 소음이 발생하면 적응형 필터를 켜짐으로 설정할 수 있습니다. 이 필터는 기계적 공진으로 인한 비정상적인 소음을 자동으로 제거하고 두 개의 공진점을 없앨 수 있습니다. 공진 주파수를 4000Hz로 설정하면 공진점이 발생하지 않습니다.
간편한 설정 - 진동 제어 설정
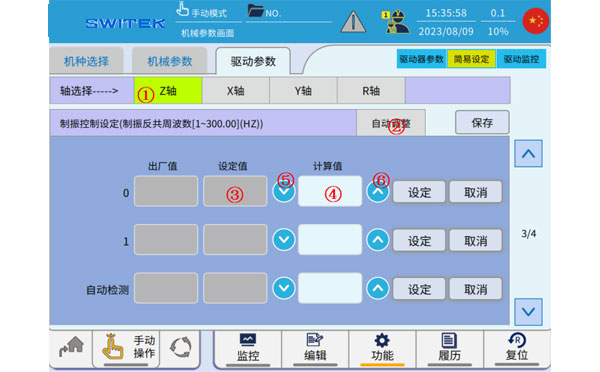
| 아니요. | 이름 | 기능 |
|---|---|---|
| (1) | 축 선택 | 작동할 축을 선택하십시오. |
| (2) | 자동 조정 | 설정된 진동 제어의 관련 매개변수가 자동으로 감지됩니다. |
| (3) | 값을 설정합니다. | 현재 사용 중인 진동 제어 매개변수. |
| (4) | 계산된 값 | 도출된 수치 값을 계산합니다. |
| (5) | | 계산된 값 내용을 설정 값에 적용합니다. |
| (6) | | "설정 값"의 내용을 "계산 값"에 적용합니다. |
진동 제어 설정: 정지 시 진동 억제에 효과적이며, 일반적인 설정값은 5~10입니다. 설정값은 토크 파형을 기반으로 간략하게 계산할 수 있지만, 처음 설정할 때는 정확한 값을 설정하기 어려울 수 있습니다.
간편한 설정 - 충돌 감지

| 아니요. | 이름 | 기능 |
|---|---|---|
| (1) | 축 선택 | 설정할 축 선택 |
| (2) | 최대 토크 변화 |
Email: sales06@switek.biz


SWITEK IML에 문의하세요
sales06@switek.biz
+86 186 5927 5869

둥관, 광둥, 중국
HuangYanZheng©Copy Right





