
sales06@switek.biz

+86 186 5927 5869

저희 채널을 구독해주세요
sales06@switek.biz
+86 186 5927 5869
저희 채널을 구독해주세요
"티칭"은 IML 로봇의 프로그램을 검토하고 편집할 수 있는 곳입니다. 모듈식으로 설계된 제어 시스템이므로, 모드 선택, 파라미터 설정, 타이머 설정, 카운터 설정을 마치면 IML 프로젝트의 초기 프로그램을 얻을 수 있습니다. "티칭" 페이지에서 프로그램을 약간 수정하여 IML 로봇이 더욱 효율적으로 작동하도록 할 수 있습니다.
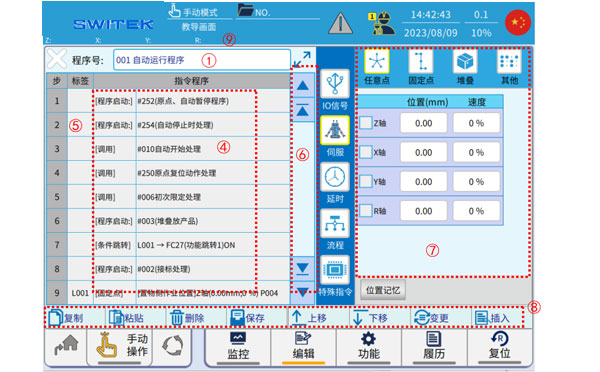
각 표시 영역에 대한 설명:
| 아니요. | 이름 | 기능 |
|---|---|---|
| (1) | 프로그램 선택/표시 | 팝업 창 "프로그램 목록"을 클릭하고 추가, 편집 또는 조회하려는 프로그램 번호를 선택한 다음 클릭하여 편집 인터페이스로 들어갑니다. |
| (2) | 프로그램 확장 표시 |  을 클릭하면 프로그램 표시의 확장 인터페이스로 이동하여 전체 명령 내용을 쉽게 확인할 수 있습니다. 을 클릭하면 프로그램 표시의 확장 인터페이스로 이동하여 전체 명령 내용을 쉽게 확인할 수 있습니다. |
| (3) | 반품 | 튜토리얼 편집 인터페이스를 종료하려면 클릭하십시오. 프로그램이 변경된 경우 컴파일하라는 메시지가 표시됩니다. |
| (4) | 교육 내용 | 명령어의 내용이 표시됩니다. |
| (5) | 레이블 열 | 탭의 편집 영역으로 이동합니다. 명령줄 앞에 레이블을 추가하려면 클릭합니다(새 레이블을 만들 때 번호를 입력하지 않고 "EN"을 클릭하면 사용되지 않은 레이블 번호가 자동으로 추가됩니다). |
| (6) | 1단계 지침 목록 |
|
| (7) | 명령 보조 목록 및 매개변수 설정 | 하위 목록 명령 편집 및 매개변수 설정. |
| (8) | 명령 편집 단축키 |
|
| (9) | 축 위치 표시 | 각 축의 현재 위치가 표시되어 쉽게 확인할 수 있습니다. |
IML 로봇 프로그램을 "학습"시키는 방법에 대한 자세한 내용은 다음과 같습니다.
프로그램 이름 표시 영역을 클릭하여 프로그램 목록으로 이동하세요.
인터페이스는 다음과 같습니다.
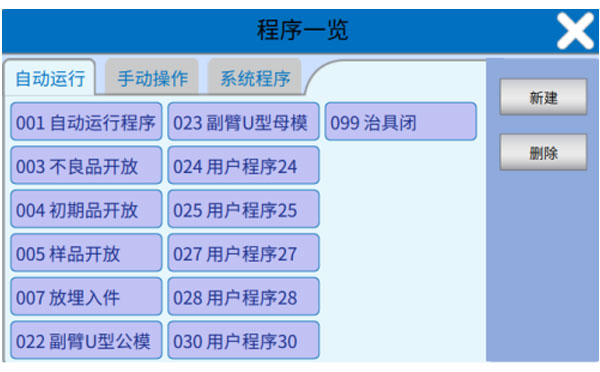
자동 실행(001-099): 001은 사용자가 편집할 수 있는 메인 프로그램이고, 024-083은 사용자가 생성하고 편집한 서브루틴입니다.
수동 조작(#178-#249):
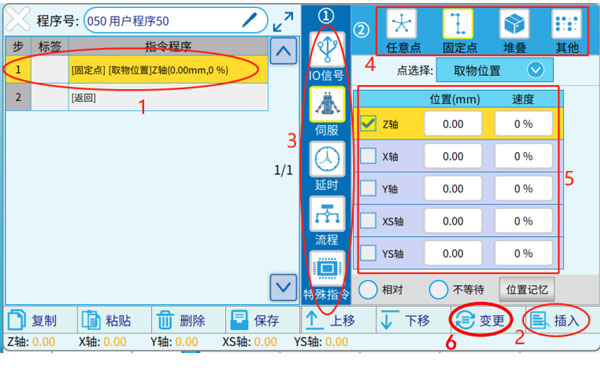
편집 인터페이스는 위 그림과 같으며, 새로운 명령줄은 다음과 같은 6단계로 구성됩니다.
다음은 가장 자주 사용되는 명령어 몇 가지입니다.
응용 프로그래밍 교육 시, 사출 성형기 및 매니퓰레이터(여기서는 IML 로봇)의 표준 IO 제어를 위한 기본 X 및 Y 좌표 로직을 사용자가 직접 수정하는 것은 권장하지 않습니다. 대신 시스템의 함수 서브루틴을 호출하여 프로그램의 정확성을 확보해야 합니다. 이러한 서브루틴은 "IO Signals" 클래스에 있습니다.
위 그림과 같이 프로그래밍 단계는 1(주요 범주), 2(하위 범주), 3(구체적인 지침), 4(구체적인 매개변수) 순으로 단계별로 설정되며, 완료 후 "변경" 또는 "삽입"을 클릭합니다.
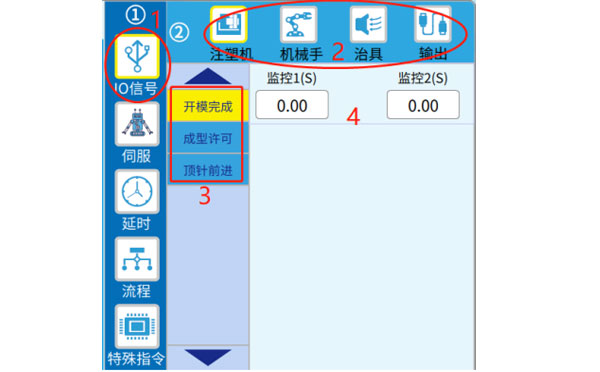
IML 로봇 관련 편의 기능을 편집할 때, 다음 그림의 버튼을 사용하여 IML 로봇 관련 지그를 조작할 수 있습니다. 오른쪽의 점을 켜거나 끄면 센싱 신호의 ON/OFF 상태를 확인할 수 있습니다.  실제 작동 시나리오를 기반으로 시뮬레이션을 프로그래밍하는 것이 편리합니다.
실제 작동 시나리오를 기반으로 시뮬레이션을 프로그래밍하는 것이 편리합니다.

입출력 지점의 출력 로직을 편집하려면 다음과 같은 편집 인터페이스를 사용하십시오.
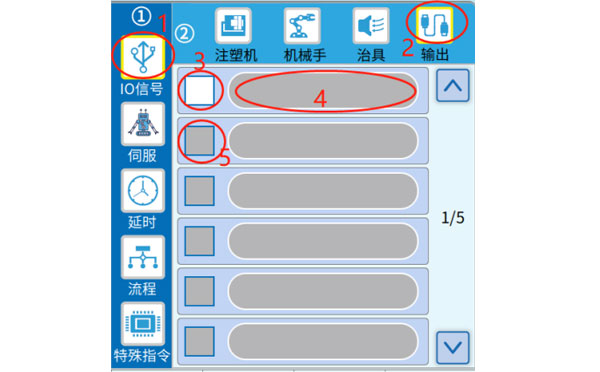
위 그림의 편집 인터페이스에서 레이블 번호 3을 클릭하면 4번 표시가 편집 가능해집니다. Y축 지점 출력 여부를 ON 또는 OFF로 선택하고 확인합니다. IML 로봇의 Y축 지점을 동시에 출력하려면 5번 표시를 클릭합니다. 두 번째 Y축 지점의 출력 편집을 시작합니다. 편집이 완료되면 "변경" 또는 "삽입"을 클릭합니다.
서보 축의 이동 명령을 편집할 수 있습니다. 여기에는 고정점(위치 설정에서 정의되고 수정 가능하며 참조할 수 있음), 임의 지점, 스택 지점(메뉴의 "스택"에서 위치 설정)으로의 이동, 그리고 축을 원점으로 되돌리는 명령 등이 포함됩니다. 고정점을 예로 들어 설명하겠습니다.
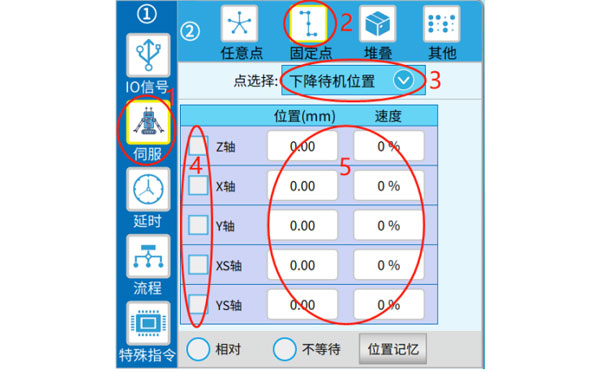
위 그림과 같이 레이블 3에서 특정 지점을 선택한 다음 레이블 4에서 실행할 축을 선택하고 레이블 5에서 지점과 속도를 설정합니다. 완료되면 "변경" 또는 "삽입"을 클릭합니다.
편집 지연 명령에는 두 가지 유형이 있습니다. 시간을 지정하는 것과 타이머를 지정하는 것입니다(타이머 시간은 자동으로 실행될 때 변경할 수 있습니다).
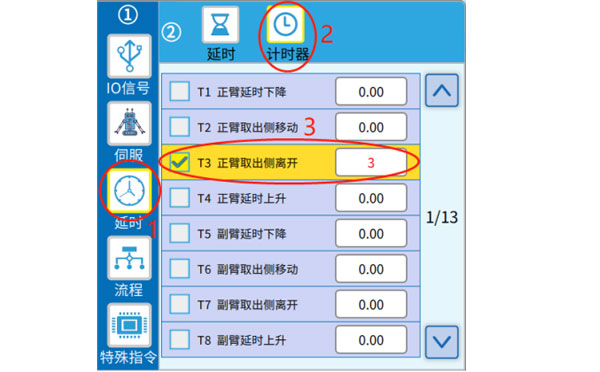
참고: 프로그래밍 교육 시 타이머를 사용하려면 특정 용도로 정의되지 않은 사용자 지정 타이머인 T85-T100을 사용하는 것이 좋습니다.
호출과 프로그램 시작은 모두 서브루틴을 사용하는 방법입니다. 차이점은 서브루틴을 호출할 때는 서브루틴 내 명령어 실행이 완료될 때까지("return" 명령어까지) 기다려야 하며, 호출이 완료되면 메인 프로그램의 다음 명령어가 실행될 수 있다는 것입니다. 반면, 프로그램 시작 시에는 서브루틴 실행을 기다릴 필요 없이 메인 프로그램의 다음 단계로 바로 넘어갈 수 있습니다(메인 프로그램과 서브루틴이 병렬로 실행됨).
프로그램 시작 명령을 편집하는 단계는 다음과 같습니다.
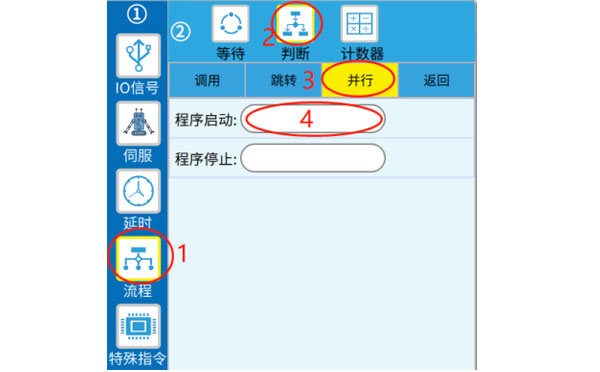
참고: 이 프로그램은 열린 서브프로그램을 시작하며, 위의 "프로그램 정지" 명령으로 닫을 수 있습니다(일반적인 상황에서는 실행이 완료되고 "return" 명령에 도달하면 서브프로그램이 자동으로 닫힙니다).
호출 명령을 편집하는 단계는 다음과 같습니다.
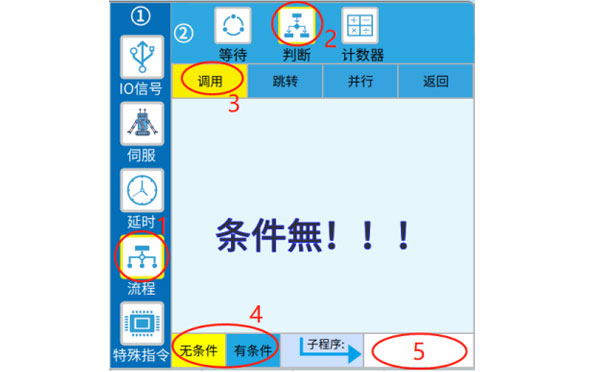
위의 아이콘 4에서 보는 바와 같이, 호출 명령을 편집할 때 조건을 설정할지 여부를 선택할 수 있습니다. "무조건"을 선택한 다음, 5번 표시에서 호출할 서브루틴 번호를 설정하여 호출을 완료합니다. "조건부"를 선택한 경우에는, 먼저 조건 설정을 완료한 다음, 6번 표시에서 프로그램 번호를 설정하고 "변경" 또는 "삽입"을 클릭해야 합니다.
참고로, 이전 조건 판단이 참이 아닐 경우, 이후 호출은 실행되지 않고 다음 줄의 명령이 시작됩니다.
점프 명령: 프로그램은 점프 명령으로 이동하고, 다음 단계에서는 해당 태그가 붙은 명령줄이 실행됩니다. 다음 순서대로 실행되는 것이 아닙니다.
점프/조건부 점프 명령 편집 단계는 다음과 같습니다.

레이블 4에 조건을 설정할지, 레이블 5에 조건을 설정할지(여러 조건을 설정할 수 있음), 레이블 6에 레이블 번호를 설정할지 선택한 다음, "변경" 또는 "삽입"을 선택하여 명령을 생성합니다. 그런 다음 대상 명령줄 앞에 있는 레이블 7의 레이블 열을 채웁니다.
"조건부" 점프가 사용되는 경우, 이전 조건 판단이 유효하지 않으면 다음 점프는 실행되지 않고, 다음 명령어 라인이 바로 시작됩니다. 조건이 참이면 해당 레이블로 점프하는 명령줄이 실행됩니다.
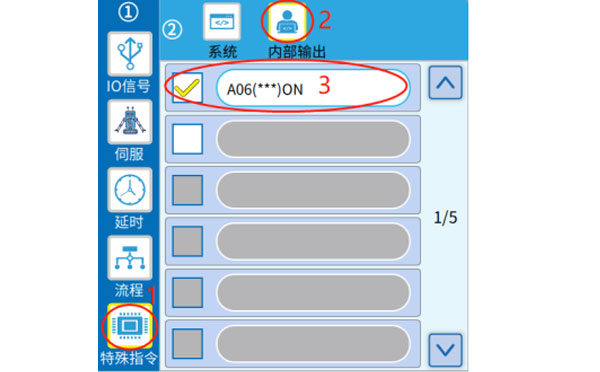
내부 플래그의 출력은 ON/OFF이며, 편집 절차는 아래 아이콘 번호에 표시되어 있습니다.
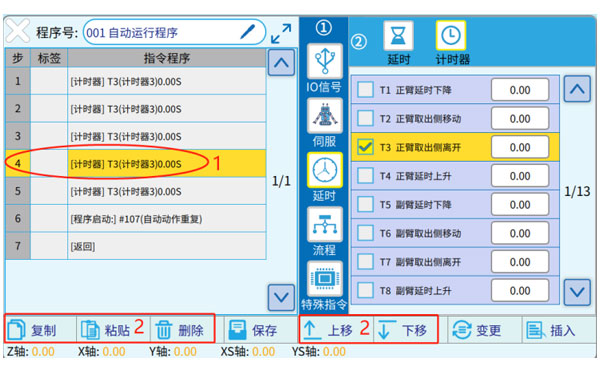
위의 아이콘 1에서 보는 것처럼 편집할 명령줄(노란색으로 표시됨)을 선택한 다음 레이블 2에 있는 버튼을 사용하여 작업을 수행합니다. 각 버튼의 기능은 다음과 같습니다.
프로그램을 편집한 후 "저장"을 클릭하거나, 다른 설정 페이지로 이동하여 "컴파일" 메시지를 띄우고 "예"를 클릭한 후 편집이 완료될 때까지 기다리세요(컴파일 후 자동으로 저장됩니다). 다른 설정 페이지로 이동하여 "컴파일" 메시지를 띄우고 "예"를 클릭하면 편집이 완료됩니다.

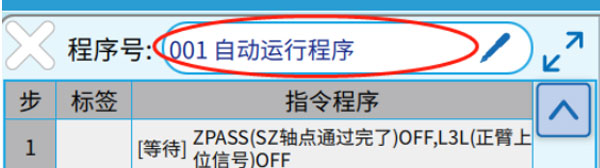
티칭 펜던트 왼쪽 상단의 스위치를 AUTO로 전환하여 자동 작동 인터페이스로 들어갑니다. 티칭 화면으로 이동하여 아래 그림과 같이 레이블 1에 표시된 "" 아이콘을 클릭합니다. 확장 표시 화면으로 들어갑니다. 레이블 2의 "단일 스텝"을 클릭하여 단일 스텝 상태로 들어가고, 레이블 3의 " " 버튼을 한 번 누릅니다. 그러면 프로그램이 1단계로 내려갑니다.
" 버튼을 한 번 누릅니다. 그러면 프로그램이 1단계로 내려갑니다.
프로그램 진행 상황은 4번에서 확인할 수 있습니다. "프로그램 번호"는 실행 중인 프로그램 번호이고, "단계 번호"는 실행 중인 프로그램의 번호입니다.

Email: sales06@switek.biz


SWITEK IML에 문의하세요
sales06@switek.biz
+86 186 5927 5869

둥관, 광둥, 중국
HuangYanZheng©Copy Right





