
sales06@switek.biz

+86 186 5927 5869

저희 채널을 구독해주세요
sales06@switek.biz
+86 186 5927 5869
저희 채널을 구독해주세요
펜던트의 화면은 IML 로봇의 인터페이스이며, 작업자는 이 화면을 통해 IML 로봇을 조작하고 프로그래밍합니다. 이 장에서는 IML 로봇을 프로그래밍하고 매개변수를 설정하는 방법을 소개합니다. 아래는 전원을 켜고 시스템을 로드한 후의 IML 로봇 인터페이스입니다. 참고하십시오.

수화기 왼쪽 상단의 다이얼을 MANU 위치로 돌리면 다음과 같은 인터페이스가 나타납니다.
(1)축 작동
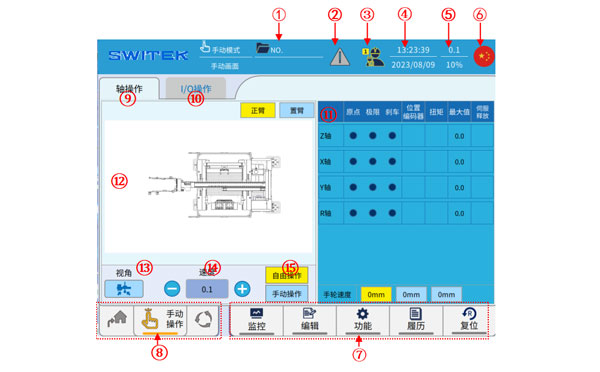
화면에 있는 각 버튼의 기능 목록:
| 아니요 | 이름 | 기능 |
|---|---|---|
| (1) | 현재 프로필 이름 | 현재 사용 중인 파일 이름을 클릭하여 파일 관리 페이지로 이동한 다음 파일을 업로드, 다운로드, 읽기, 저장, 덮어쓰기, 비교 및 삭제할 수 있습니다. |
| (2) | 알람 표시 | 현재 경보 상태인 경우 아이콘이 표시됩니다. 아이콘을 클릭하여 경보 세부 정보를 확인하세요. |
| (3) | 사용자 수준 | 현재 사용자 레벨이 표시됩니다. 클릭하여 사용자 레벨 1/2/3/4(운영자/기술자/관리자/최고 레벨)로 전환하고 각 사용자의 비밀번호를 변경할 수 있습니다. |
| (4) | 시스템 시간 | 현재 날짜와 시간을 표시합니다. 클릭하여 설정을 변경하세요. |
| (5) | 속도 표시 | 현재 수동 속도/자동 속도 표시. 클릭하여 속도를 변경하세요. |
| (6) | 언어 표시 | 현재 시스템에는 언어 아이콘이 표시됩니다. 아이콘을 클릭하여 화면 표시 언어를 전환하세요. |
| (7) | 리본 단추 | 다른 함수 항목을 수정하려면 [보기]를 클릭하세요. |
| (8) | 실행 모드 표시 | 현재 작동 모드 표시(Origin/수동/자동)는 티칭 펜던트 왼쪽 상단의 노브를 통해 전환할 수 있습니다. |
| (9) | 축 작동 | 시스템의 기본 축 작동 페이지로 들어가면 (13) IO 작동 (14) 축 표시 페이지로 전환할 수 있습니다. |
| (10) | 입출력 작업 | 클릭하면 IO 작동 인터페이스로 들어가 입력 ON/OFF 상태와 각 출력 지점의 ON/OFF 상태를 실시간으로 표시할 수 있습니다. |
| (11) | 축 표현 | 축 표시 인터페이스에서 오른쪽 버튼을 사용하여 축을 조작하면 원점, 리미트, 브레이크, 현재 위치, 축 토크 및 속도의 실시간 상태를 확인할 수 있습니다. |
| (12) | 축 작동 버튼 | (8)과 (9)의 메인과 지브를 전환하고 클릭하여 각 축을 이동하세요. |
| (13) | 관점 전환 | 샤프트가 (15)를 통해 작동되면 시야각이 바뀌므로 실제 기계와 비교하기가 편리합니다. |
| (14) | 속도 전환 | 클릭하여 수동 주행 속도를 전환하세요. 속도는 0.1/1.0/저속/중속/고속의 5단계로 나뉩니다. 단, 0.1/1.0 스케일을 사용할 때는 축이 원래 위치로 돌아가지 않고 움직일 수 없습니다. |
| (15) | 자유로운 수동 작동 | 자유 조작: 각 축의 조그 움직임을 버튼을 눌러 개별적으로 제어할 수 있습니다. 수동 조작: 각 축을 제어하여 버튼을 눌러 고정된 지점으로 이동시킬 수 있습니다. |
(2) I/O 동작
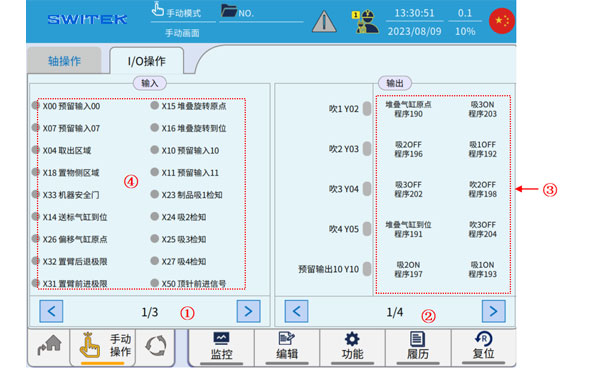
화면에 있는 각 주석 기능 목록:
| 아니요. | 이름 | 기능 |
|---|---|---|
| (1) | 페이지 전환 | 입력 화면의 페이지를 전환합니다. |
| (2) | 페이지 전환 | 출력 버튼의 페이지를 전환합니다. |
| (3) | 출력 버튼 | 티치 펜던트 뒷면의 안전 활성화 스위치를 길게 누른 다음 각 버튼을 클릭하여 출력을 켜거나 끄십시오. |
| (4) | 입력 표시 | 입력 신호의 켜짐/꺼짐 표시. |
Email: sales06@switek.biz


SWITEK IML에 문의하세요
sales06@switek.biz
+86 186 5927 5869

둥관, 광둥, 중국
HuangYanZheng©Copy Right





