
sales06@switek.biz

+86 186 5927 5869

저희 채널을 구독해주세요
sales06@switek.biz
+86 186 5927 5869
저희 채널을 구독해주세요
IML 로봇을 일상적으로 사용할 때, 향후 잘못된 작동이나 설정 오류가 발생할 경우를 대비하여 매개변수 설정 후 프로그램을 백업하는 것이 좋습니다. 이 장에서는 IML 로봇 프로그램을 USB에 내보내는 방법과 USB 키에서 프로그램을 다시 로드하는 방법에 대해 설명합니다.
PENDANT를 사용하여 프로그램을 다운로드할 때는 다음 요구 사항을 충족해야 합니다.
우선 USB 드라이브의 루트 디렉토리에 새 폴더 4개를 생성해야 합니다.
[펜업데이트], [펜메시지], [컨트롤러업데이트], [NCP]
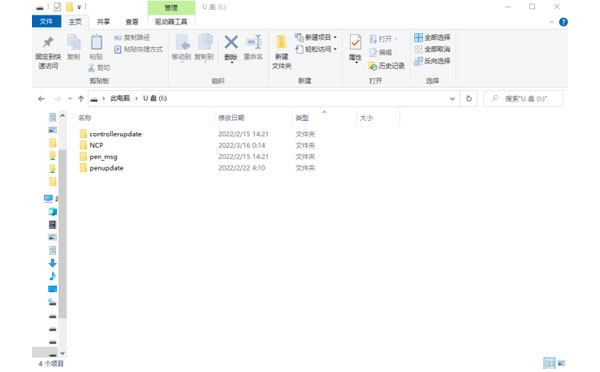
다운로드한 파일을 아래 표에 나와 있는 해당 폴더에 넣어주세요.
관련 파일 목록
| 왼쪽 폴더 | 오른쪽 파일 | 삽화를 그리다 | |
|---|---|---|---|
| [penupdate] | pne_set | 펜던트 설치 | 재부팅이 적용됩니다 |
| pendant-gui | Qt 리눅스 실행 파일 | ||
| pen_msg | all_msg.txt | 펜던트 텍스트 정보 | |
| 기타 메시지... | 펜던트 텍스트 정보 | ||
| [컨트롤러 업데이트] | TRC1000.dsb | 컨트롤러 동작 프로그램 | |
| TRC1000.dop | 컨트롤러 초기화, 설정 | ||
| motc.dat | 모션 제어 프로그램 | ||
| machine01 | 기계적 매개변수 프로그램 01 | ||
| ... | ... | ||
| machine32 | 기계적 매개변수 프로그램 32 | ||
| [NCP] | NCP01.NCP | NCP File | 컴파일 후 적용됩니다. |
| ... | |||
| NCP99.NCP | NCP 파일 | ||
USB 케이블을 휴대폰의 USB 포트에 삽입하십시오. 특수 처리되지 않은 일반 브랜드의 USB 케이블을 사용하는 것이 좋습니다.
화면 상단의 [파일 관리] 아이콘을 탭한 다음, [USB에서 가져오기]를 선택하세요.
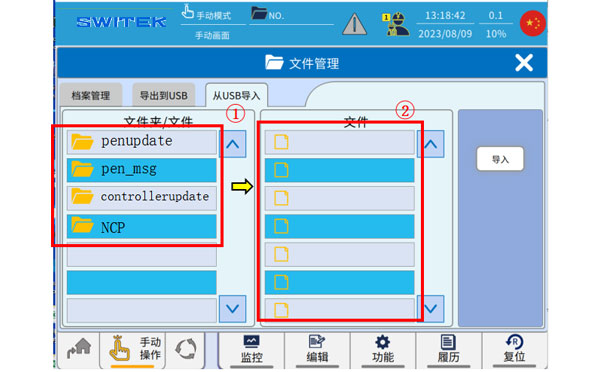
USB에서 파일이 인식되면 [USB에서 가져오기]는 USB 플래시 드라이브에 미리 준비된 폴더를 표시합니다.
(2)에서 폴더를 선택하여 (1)의 폴더 안에 있는 하위 파일을 표시하고, 가져올 하위 파일을 선택한 다음 [가져오기]를 클릭합니다. ((2)만 선택하고 [가져오기]를 클릭하면 폴더의 모든 내용이 다운로드됩니다.)
다운로드가 완료되면 다운로드된 파일의 안내에 따라 다운로드가 다시 시작되며, 다운로드된 파일은 다시 시작된 후에 적용됩니다.
재시작 필요 여부에 대한 자세한 내용은 [파일 다운로드 표]를 참조하십시오.
Email: sales06@switek.biz


SWITEK IML에 문의하세요
sales06@switek.biz
+86 186 5927 5869

둥관, 광둥, 중국
HuangYanZheng©Copy Right





