
sales06@switek.biz

+86 186 5927 5869

저희 채널을 구독해주세요
sales06@switek.biz
+86 186 5927 5869
저희 채널을 구독해주세요
IML 로봇을 재시작할 때마다 로봇 팔의 축을 원점 위치로 되돌리는 것이 매우 중요합니다. 이 장에서는 자동 실행 전에 IML 로봇의 "원점 재설정(ORG)"을 수행하는 방법을 배우게 됩니다.
티치 펜던트의 왼쪽 상단에 있는 노브를 ORI로 돌리면 인터페이스가 초기 화면으로 이동합니다.
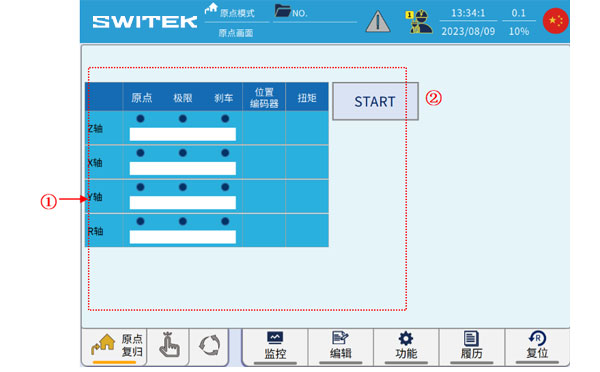
| 아니요 | 이름 | 기능 |
|---|---|---|
| (1) | 축 데이터 |
|
| (2) | 시작 키 | 클릭하면 자동으로 출발지로 복귀하는 작업이 시작됩니다. |
Origin ORG 모드에서 시작 버튼을 눌러 Origin 재설정을 시작하십시오.
Email: sales06@switek.biz


SWITEK IML에 문의하세요
sales06@switek.biz
+86 186 5927 5869

둥관, 광둥, 중국
HuangYanZheng©Copy Right





