
sales06@switek.biz

+86 186 5927 5869

저희 채널을 구독해주세요
sales06@switek.biz
+86 186 5927 5869
저희 채널을 구독해주세요
로봇 팔을 작동시키는 것은 제어 시스템과 기계 구조의 협력이며, 전기 보드는 제어 시스템과 로봇 팔의 기계 구조 사이의 매개체입니다. 이 장에서는 로봇 팔에 설치된 보드의 포트 정의에 대해 살펴보겠습니다.
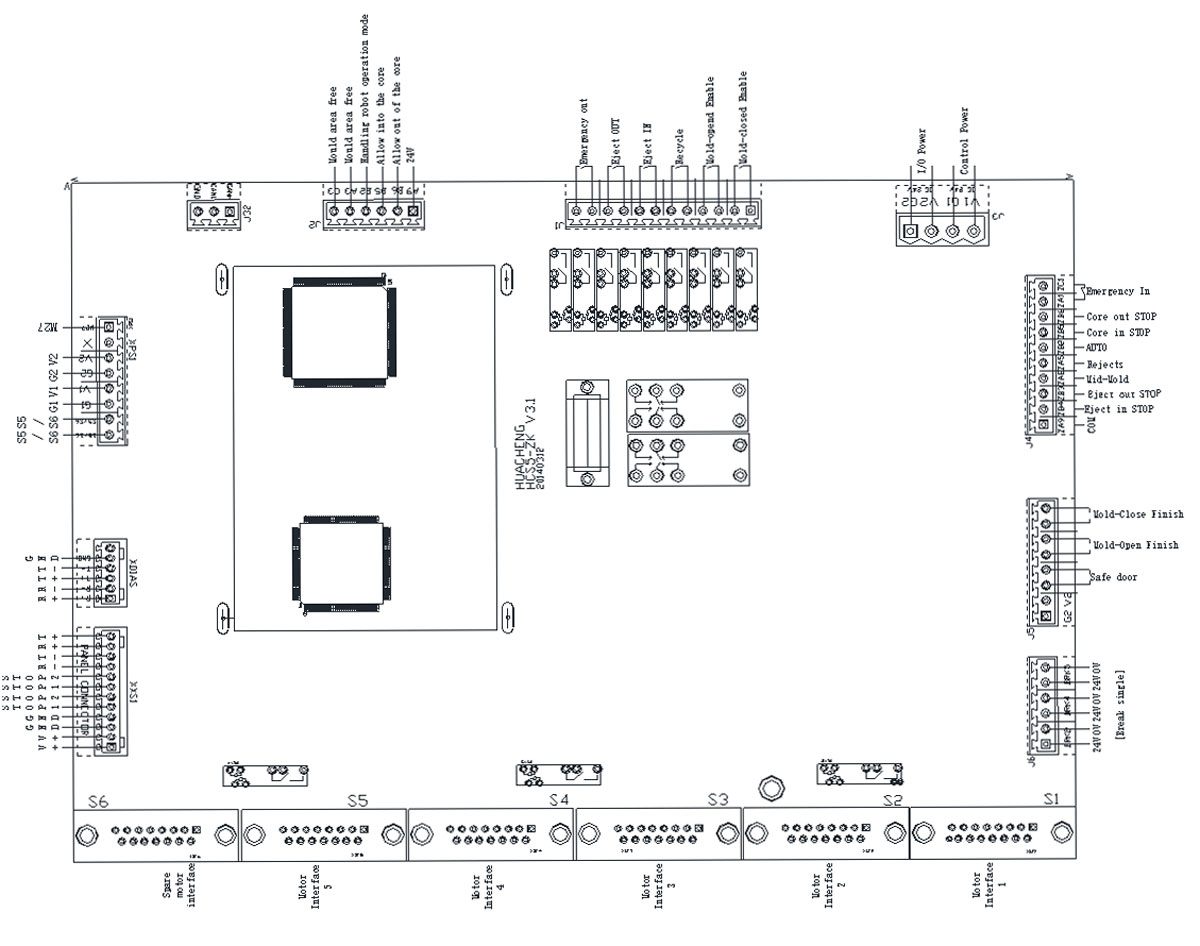
위의 그림은 SWITEK 5축 서보 사출 로봇 팔의 메인 보드의 포트 정의입니다.
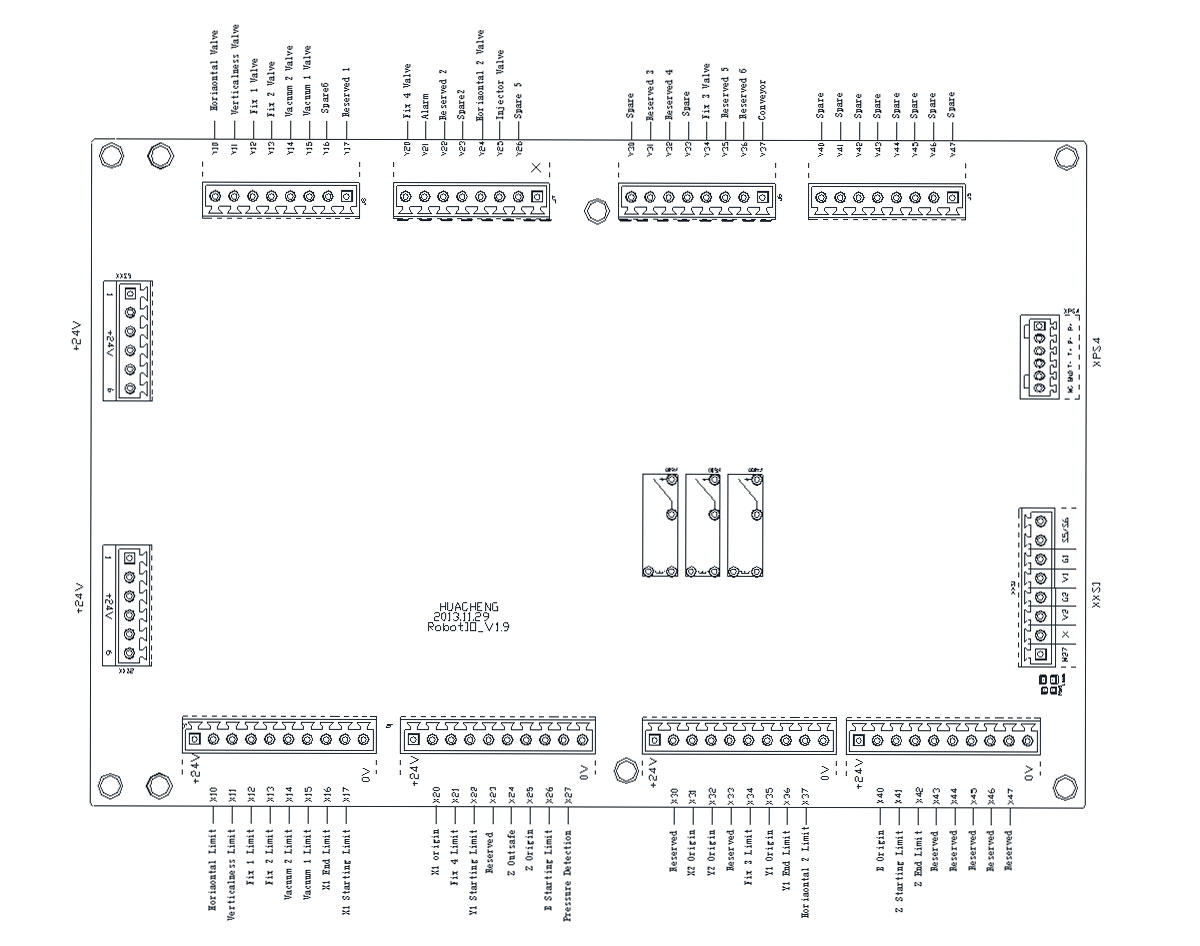
위의 그림은 SWITEK 5축 서보 사출 로봇 팔의 I/O 보드의 포트 정의입니다.
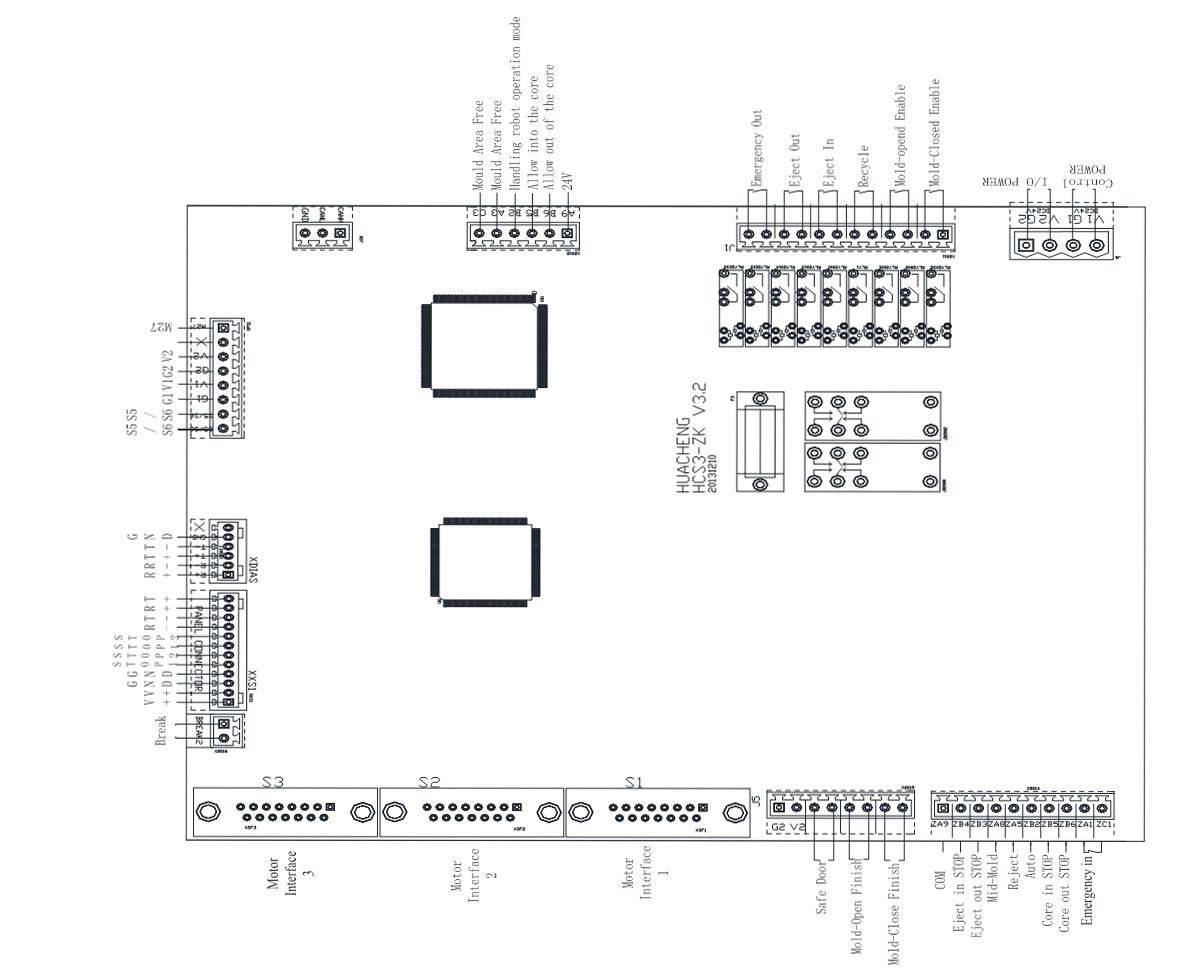
위의 그림은 SWITEK 3축 서보 사출 로봇 팔의 메인 보드의 포트 정의입니다.
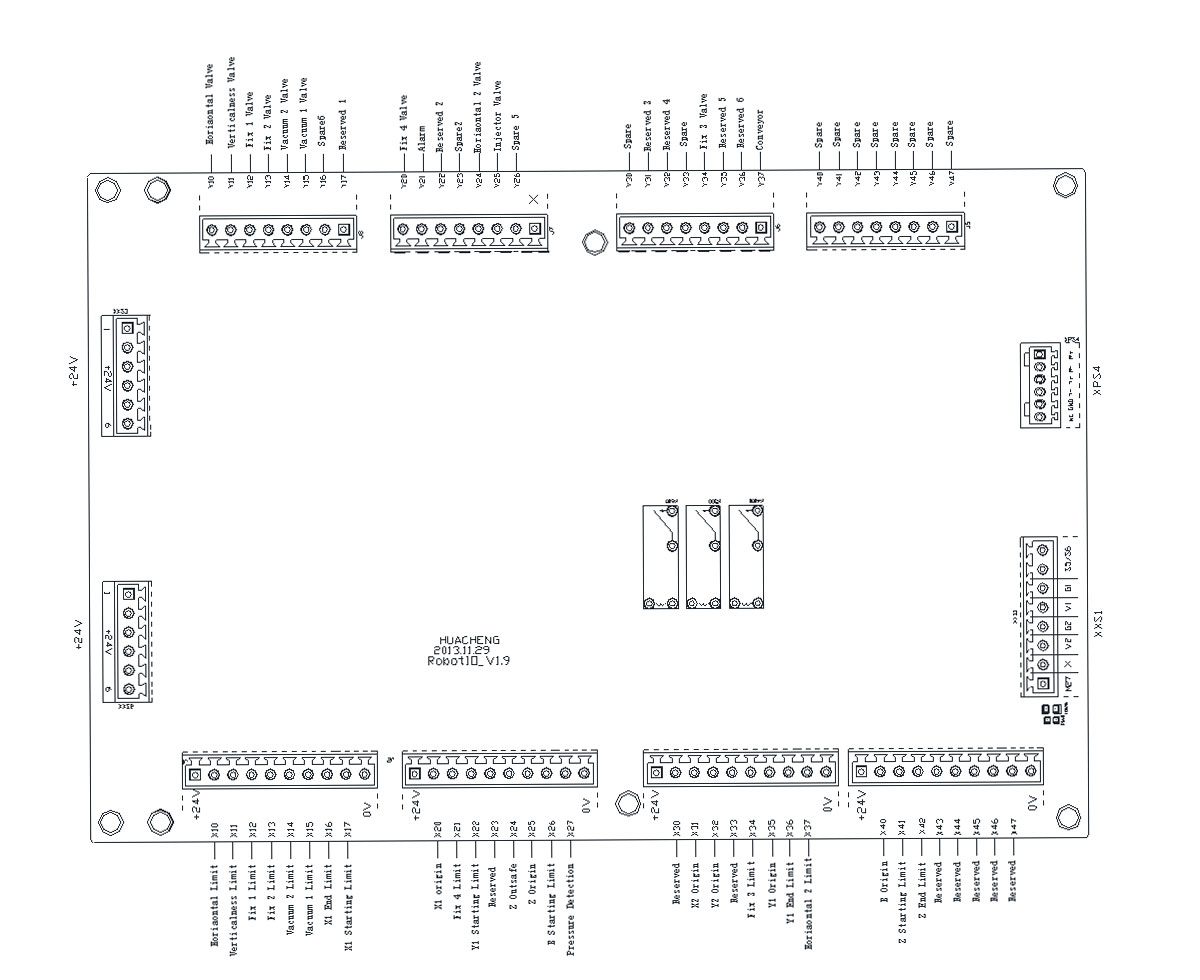
위의 그림은 SWITEK 3축 서보 사출 로봇 팔의 I/O 보드의 포트 정의입니다.
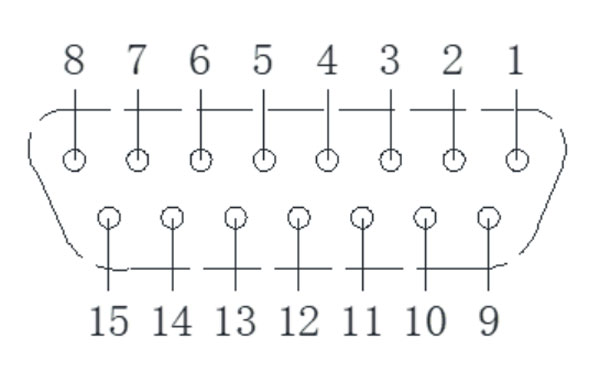
| 핀 번호 | 터미널 정의 | 핀 번호 | 터미널 정의 |
|---|---|---|---|
| 1 | +24V | 9 | 0V |
| 2 | OA+ | 10 | P+ |
| 3 | OA- | 11 | P- |
| 4 | OB+ | 12 | BRAKE |
| 5 | OB- | 13 | N+ |
| 6 | OZ+ | 14 | N- |
| 7 | OZ- | 15 | ALM |
| 8 | SON | 15 |
Email: sales06@switek.biz


SWITEK IML에 문의하세요
sales06@switek.biz
+86 186 5927 5869

둥관, 광둥, 중국
HuangYanZheng©Copy Right





