
sales06@switek.biz

+86 186 5927 5869

저희 채널을 구독해주세요
sales06@switek.biz
+86 186 5927 5869
저희 채널을 구독해주세요
사출 성형 프로젝트를 위한 로봇 팔을 주문하시면, 프로젝트에 따라 로봇 팔을 작업자 쪽 또는 작업자가 아닌 쪽에서 부품을 떨어뜨릴 수 있도록 조립해 드립니다. 하지만 경우에 따라 부품을 사출 성형기의 반대쪽으로 떨어뜨려야 할 수도 있습니다. 이 경우 로봇 팔의 설치를 반대로 해야 합니다. 이 장에서는 파나소닉 서보 모터와 드라이버를 탑재한 3축 서보 사출 로봇을 예로 들어 로봇 팔을 반대로 설치하는 방법을 보여드리겠습니다.
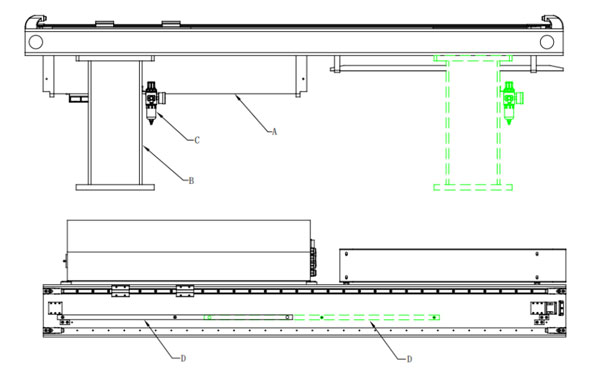
베이스 리버스
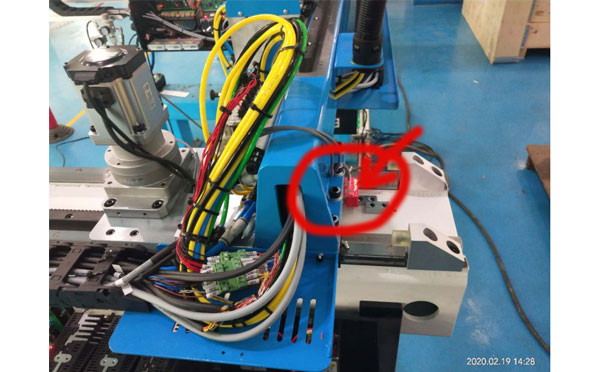
센서 역방향 1
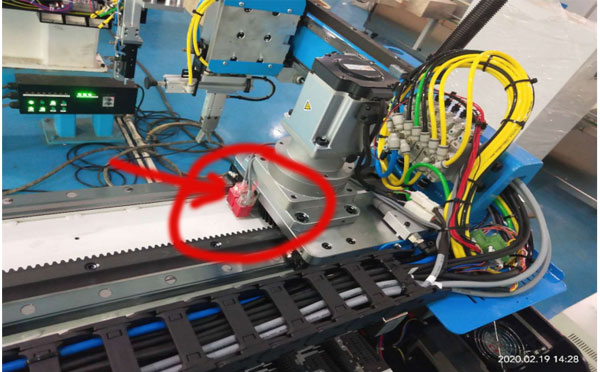
센서 역방향 2
설명

파나소닉 A6 매개변수 설정
수정 과정:
"S" 키를 누른 후 "M" 키를 한 번 누르고 Pr0.00을 찾은 후 "S" 키를 한 번 누릅니다. 표시된 매개변수가 "1"이면 "0"으로 수정합니다. "0"이면 "1"로 변경합니다(위/아래 키를 눌러 매개변수를 수정합니다). 모든 설정이 완료되면 "S" 키를 2초 동안 누르고 "M" 키를 한 번 누르고 "S" 키를 한 번 누르고 "UP" 키를 누릅니다(화면에 "-----"가 표시될 때까지 7초간 유지). 설정을 저장합니다.
위의 과정을 반복하여 Pr0.12의 매개변수를 설정하고, 모든 매개변수 설정이 완료되면 로봇의 전원을 껐다가 다시 켜세요. 로봇은 새로운 설정으로 초기화됩니다.
경고: 시설의 안전을 위해 매개변수를 수정하는 모든 작업은 온라인 서비스팀의 지시에 따라 진행해 주십시오. 서비스 엔지니어가 전체 과정을 단계별로 안내해 드립니다.
Email: sales06@switek.biz


SWITEK IML에 문의하세요
sales06@switek.biz
+86 186 5927 5869

둥관, 광둥, 중국
HuangYanZheng©Copy Right





