
sales06@switek.biz

+86 186 5927 5869

저희 채널을 구독해주세요
sales06@switek.biz
+86 186 5927 5869
저희 채널을 구독해주세요
사출 성형기용 로봇 팔 프로그래밍은 축 위치 설정, 실린더 및 기타 EOAT 부품 활성화/비활성화 등뿐만 아니라, 로봇이 사출 성형기와 통신할 수 있도록 하는 신호 설정, 제품 설정, 스택 설정, 기계 구성, 시스템 설정, 보안 지점 설정 등도 포함합니다. 이 장에서는 로봇 팔의 이러한 매개변수를 단계별로 구성하는 방법을 설명합니다.
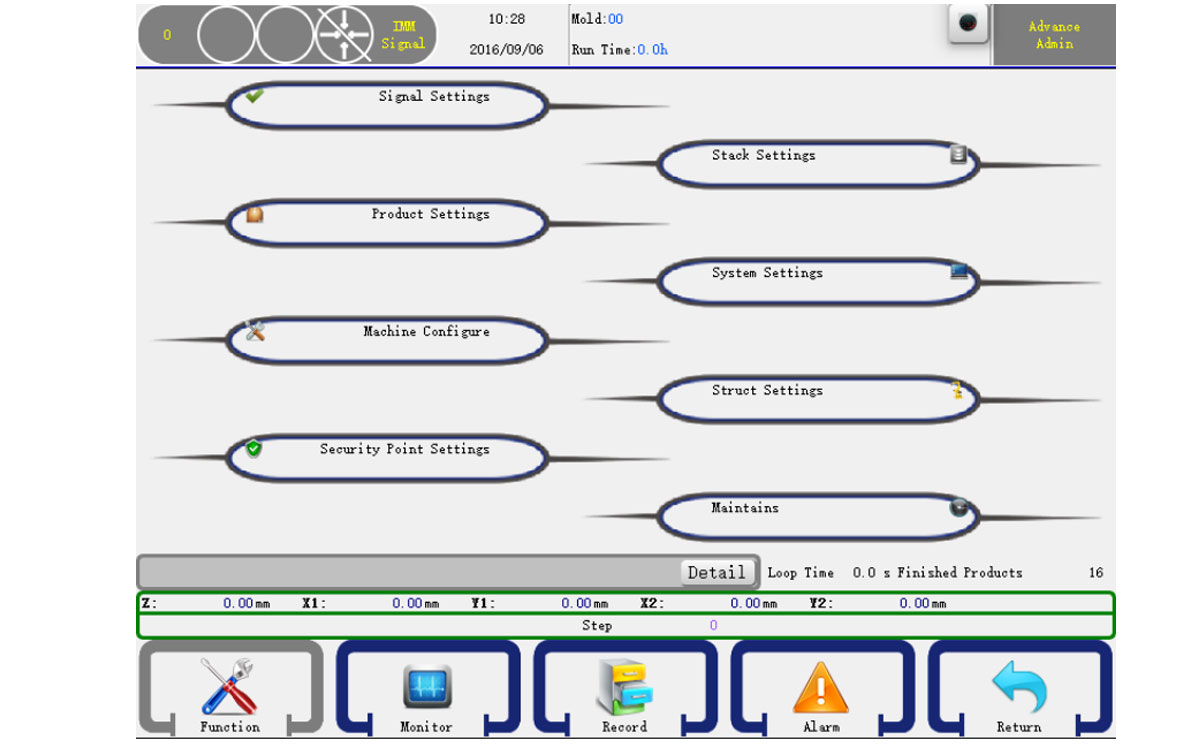
정지 상태에서 메인 메뉴 막대의 기능 메뉴 항목을 클릭하여 기능 구성 페이지로 이동합니다. 아래 그림과 같습니다.
아래와 같이 신호 설정 항목을 클릭하면 신호 설정 페이지로 이동합니다.

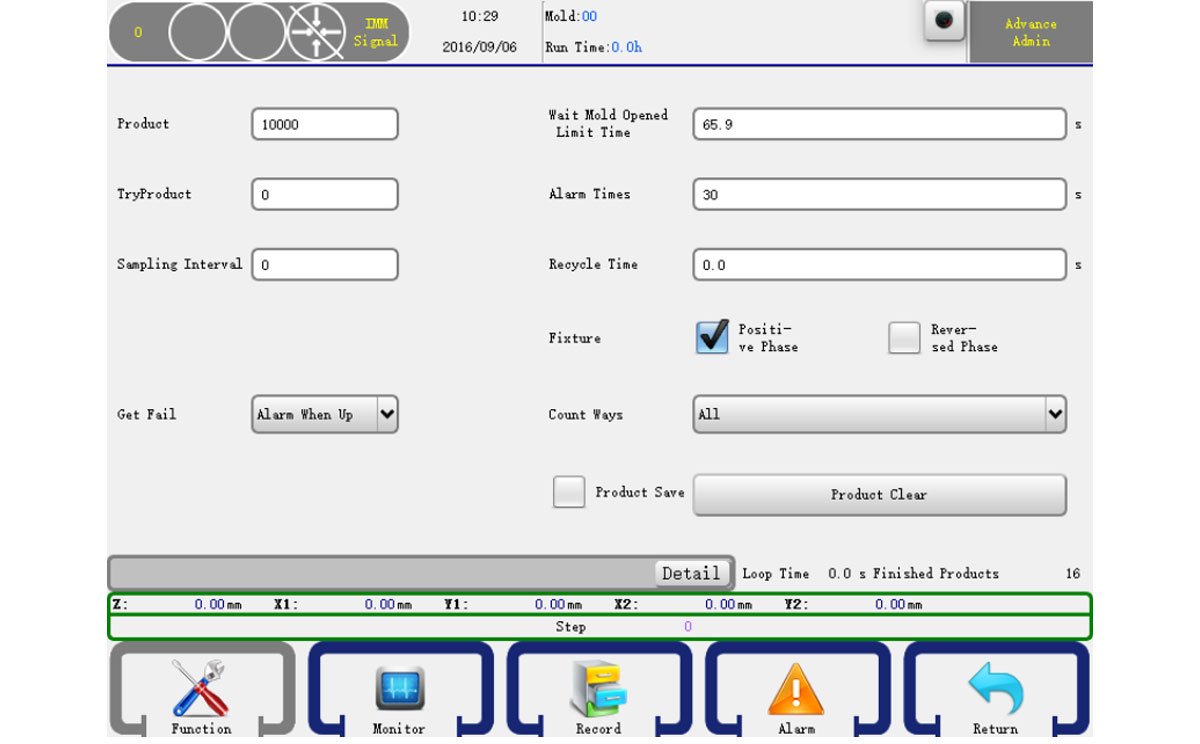
아래와 같이 제품 설정 버튼을 클릭하면 제품 설정 페이지로 이동합니다.
아래와 같이 머신 구성 버튼을 클릭하면 머신 구성 페이지로 이동합니다.
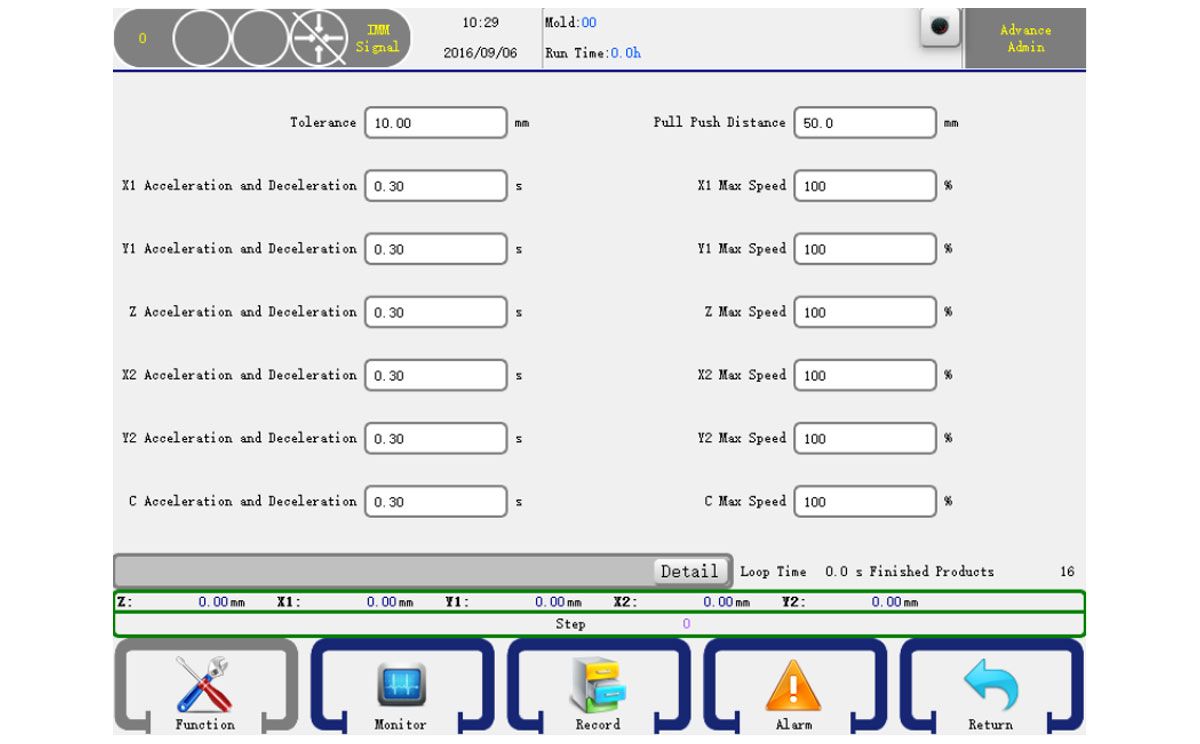
허용 오차: 서보의 송신 펄스와 피드백 펄스 사이의 허용 오차입니다.
안전 영역: 암과 보조 암 사이의 안전 영역입니다.
X, Y, Z 가속 및 감속: 서보 축의 가속 및 감속 시간입니다.
X, Y, Z 최대 속도: 서보 축의 최대 속도입니다.
아래와 같이 보안 지점 설정 버튼을 클릭하면 보안 지점 설정 페이지로 이동합니다.
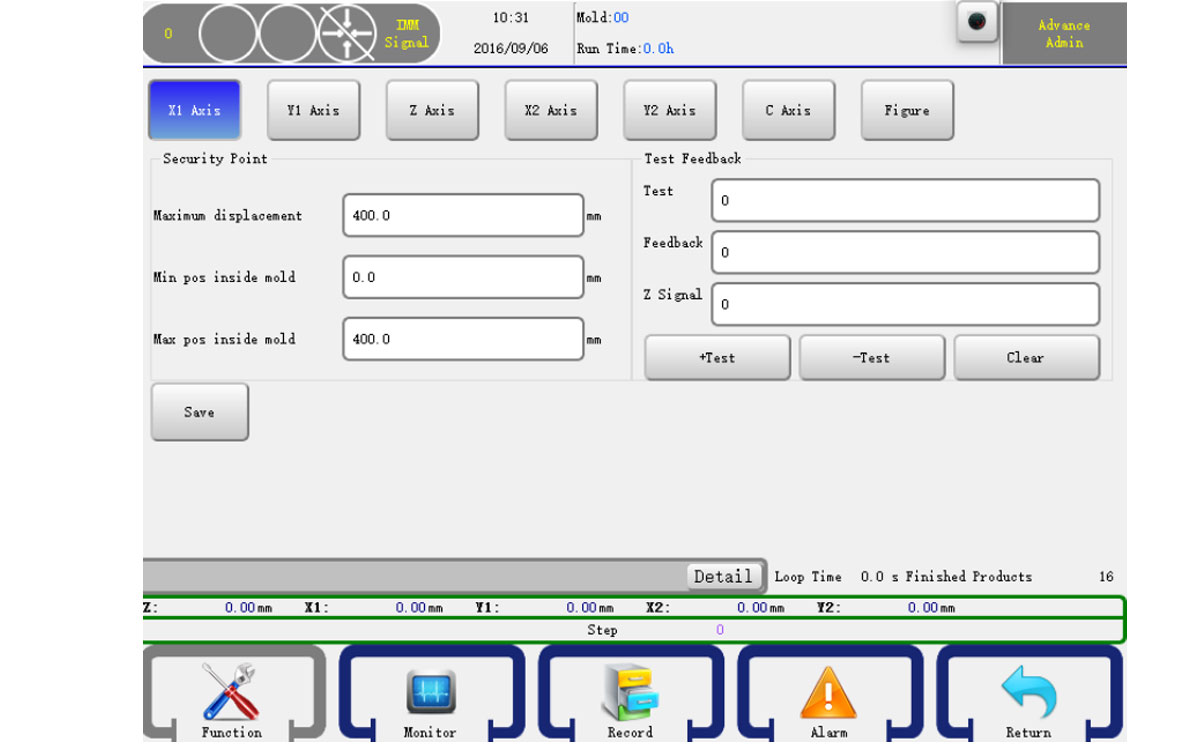
주의:기계적 매개변수 페이지 X축 매개변수 필드에서 X의 최소, 최대 위치를 수정할 수 있습니다.
아래와 같이 스택 설정 항목을 클릭하면 스택 설정 페이지로 이동합니다.
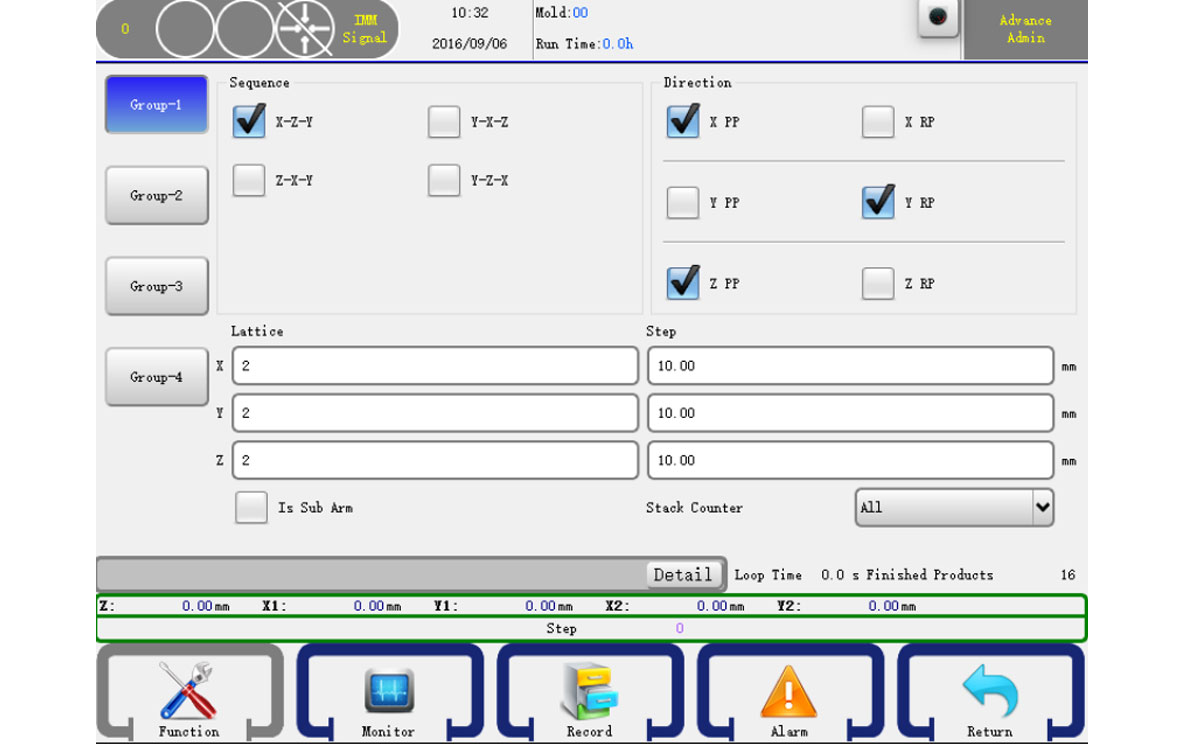
저희 시스템에는 네 가지 그룹 스택 설정이 있습니다.
순서: 스택 순서를 선택합니다.
X RP: 선택하면 로봇이 X축을 기준으로 역방향으로 스택합니다.
Y RP: 선택하면 로봇이 Y축을 기준으로 역방향으로 스택합니다.
Z RP: 선택하면 로봇이 Z축을 기준으로 역방향으로 스택합니다.
7.6.1 설정
아래와 같이 시스템 설정 항목을 클릭하면 시스템 설정 페이지로 이동합니다.
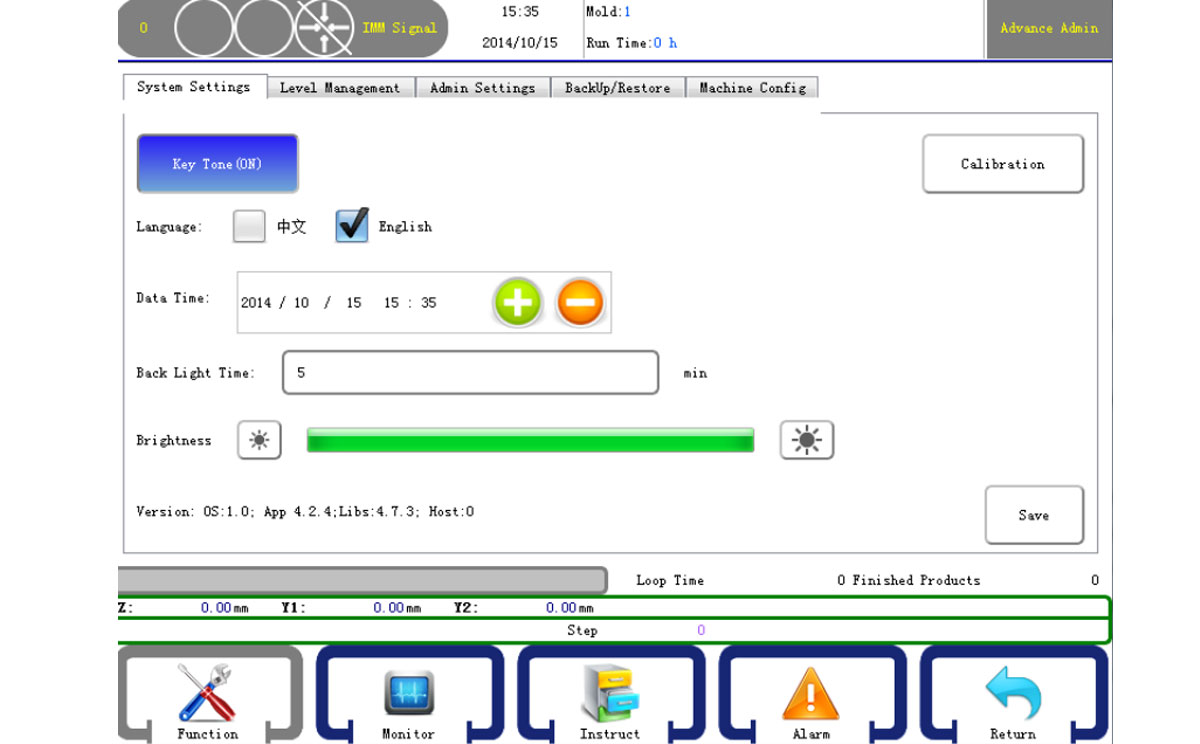
키 톤: 키보드가 켜져 있으면 누르면 경고음이 울립니다.
언어: 인터페이스 언어를 선택합니다.
날짜 시간: 현재 날짜 시간을 설정합니다.
백라이트 시간: 설정된 시간 내에 아무런 동작이 없으면 백라이트가 꺼집니다.
버전: 시스템 버전입니다.
시스템 설정이 완료되면 저장을 클릭하여 저장합니다.
7.6.2 레벨 관리
아래와 같이 레벨 관리 항목을 클릭하면 시스템 설정 페이지로 이동합니다.
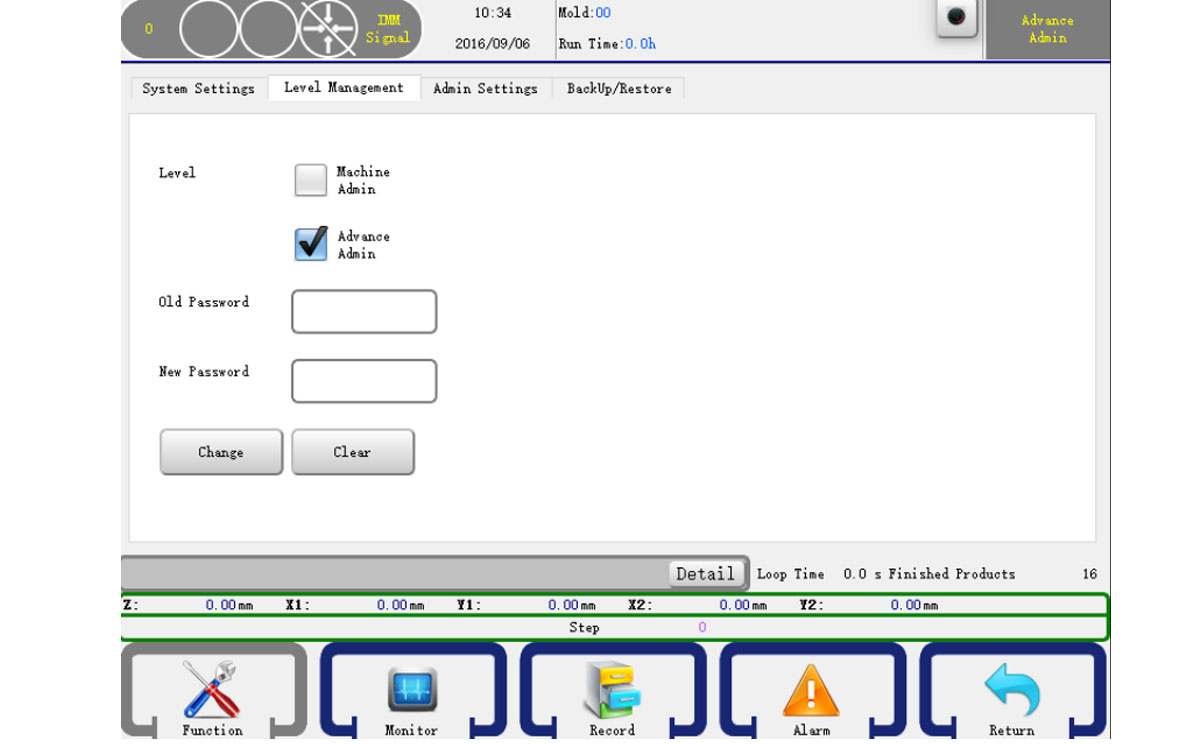
레벨 관리자는 기본 정보를 변경할 수 있으며, 관리자는 모든 매개변수를 수정할 수 있습니다. 이전 비밀번호를 입력한 후 새 비밀번호를 입력하고 확인을 클릭하면 비밀번호를 변경할 수 있습니다.
7.6.3 백업/복원
아래와 같이 백업/복원 항목을 클릭하면 시스템 설정 페이지로 이동합니다.
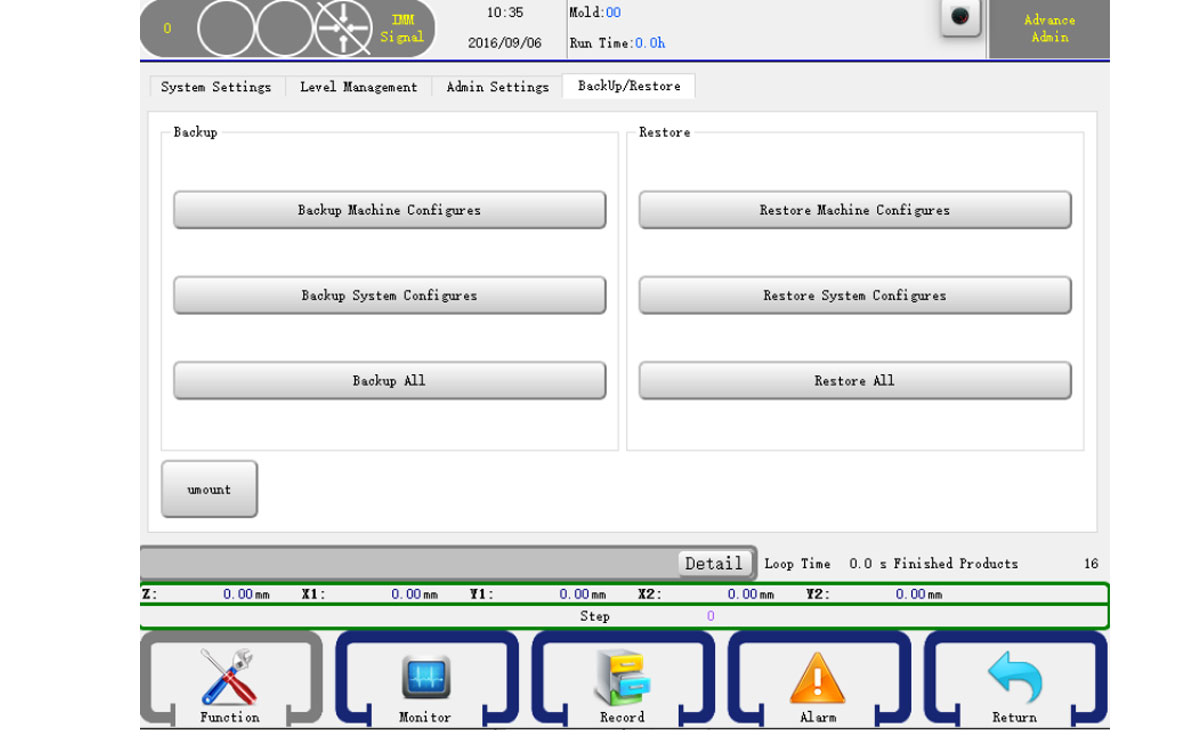
USB를 사용하여 "기계 매개변수", "시스템 매개변수" 및 "금형 매개변수"를 백업하거나 복원할 수 있으며, 모두 선택하여 백업/복원할 수 있습니다.
아래와 같이 구조 설정 항목을 클릭하면 구조 설정 페이지로 이동합니다.
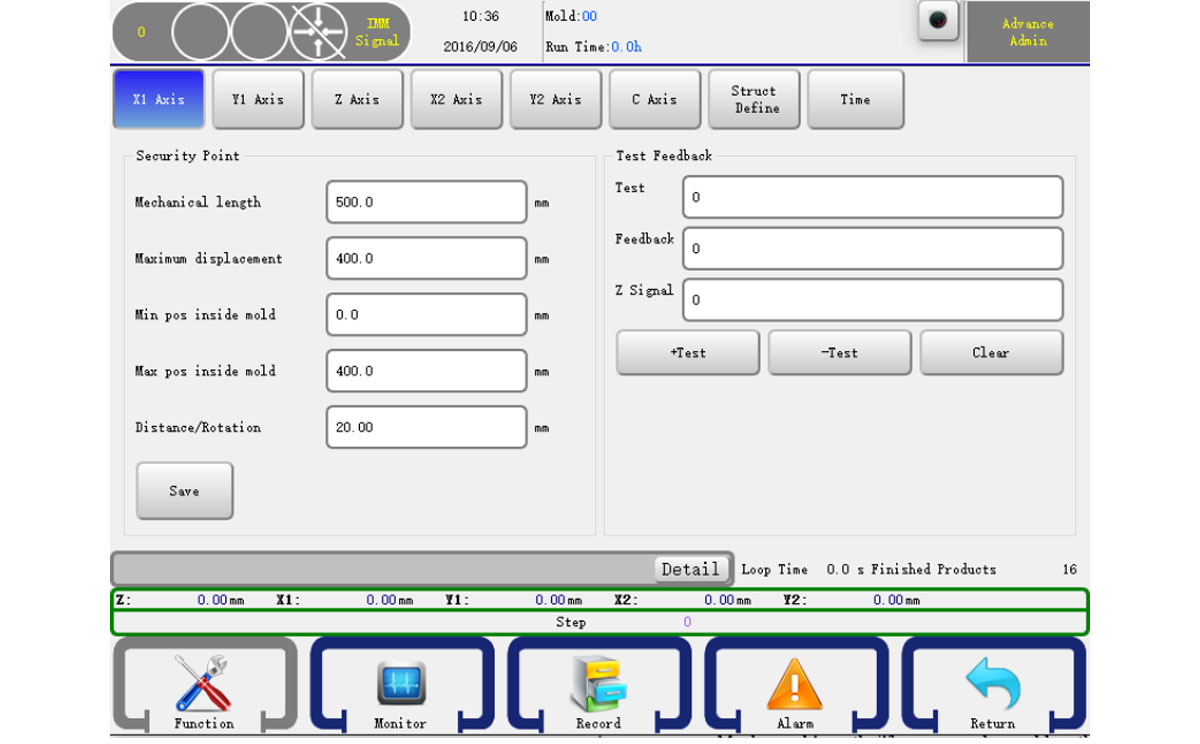
기계 길이: 축의 기계 길이입니다.
거리/회전: 서보 1회전 거리입니다.
다른 매개변수를 5.4로 설정할 수도 있습니다. 변경 사항을 확인하려면 저장 버튼을 누르세요. 경고: 구조 정의는 기계 손상 및 부상을 초래할 수 있습니다! 제조업체에 문의하십시오.
아래와 같이 유지 관리 항목을 클릭하면 유지 관리 페이지로 이동합니다.
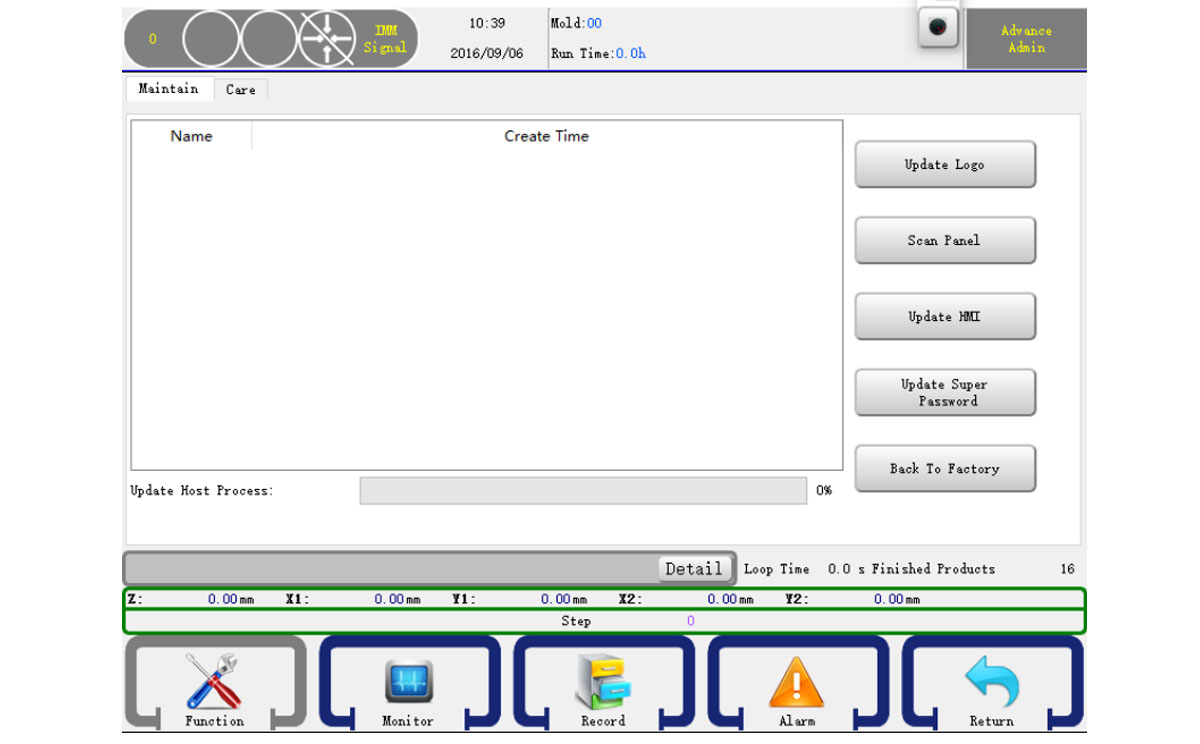
USB를 사용하여 제어판 시스템을 업데이트할 수 있습니다. 시스템 업데이트 패킷을 USB 메모리에 넣으세요. 새로 고침 버튼을 클릭하고 잠시 기다리세요. 디스크에서 시스템 업데이트 패킷을 확인할 수 있으면 시스템 버전이 표시됩니다. 확인할 수 없으면 새로 고침 버튼을 다시 누르거나 다른 USB 메모리를 사용하세요. 시스템 업데이트 패킷을 확인하면 업데이트 버튼을 클릭하여 시스템 업데이트를 시작하세요. 완료되면 메시지가 표시되고 시스템이 다시 시작되며, 그러면 USB 메모리를 분리할 수 있습니다.
Email: sales06@switek.biz


SWITEK IML에 문의하세요
sales06@switek.biz
+86 186 5927 5869

둥관, 광둥, 중국
HuangYanZheng©Copy Right





