
sales06@switek.biz

+86 186 5927 5869

저희 채널을 구독해주세요
sales06@switek.biz
+86 186 5927 5869
저희 채널을 구독해주세요
이 장에서는 사출 성형기용 SWITEK 3/5축 서보 로봇 암의 상세한 배선도를 소개합니다. 여기에는 I/O, 메인 보드와 패널, 메인 보드와 서보 간의 배선이 포함됩니다. 이 장의 목적은 SWITEK 3/5축 서보 로봇 암의 제어에 대한 개념을 익히는 것입니다.
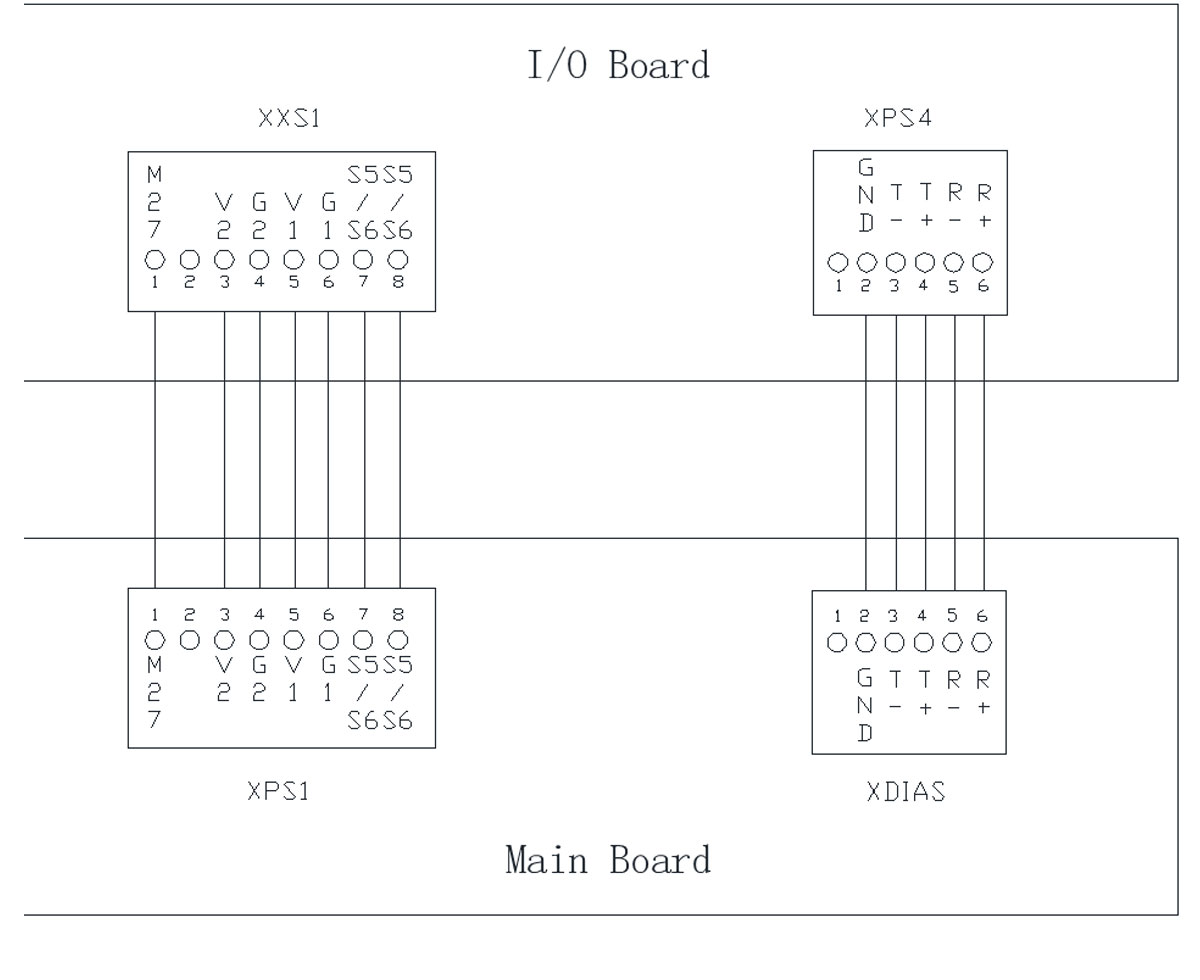
메인 보드는 제어 신호를 생성하고 I/O 보드를 통해 이를 분배하여 로봇 팔을 제어하여 복잡한 자동화 프로세스를 완료합니다.
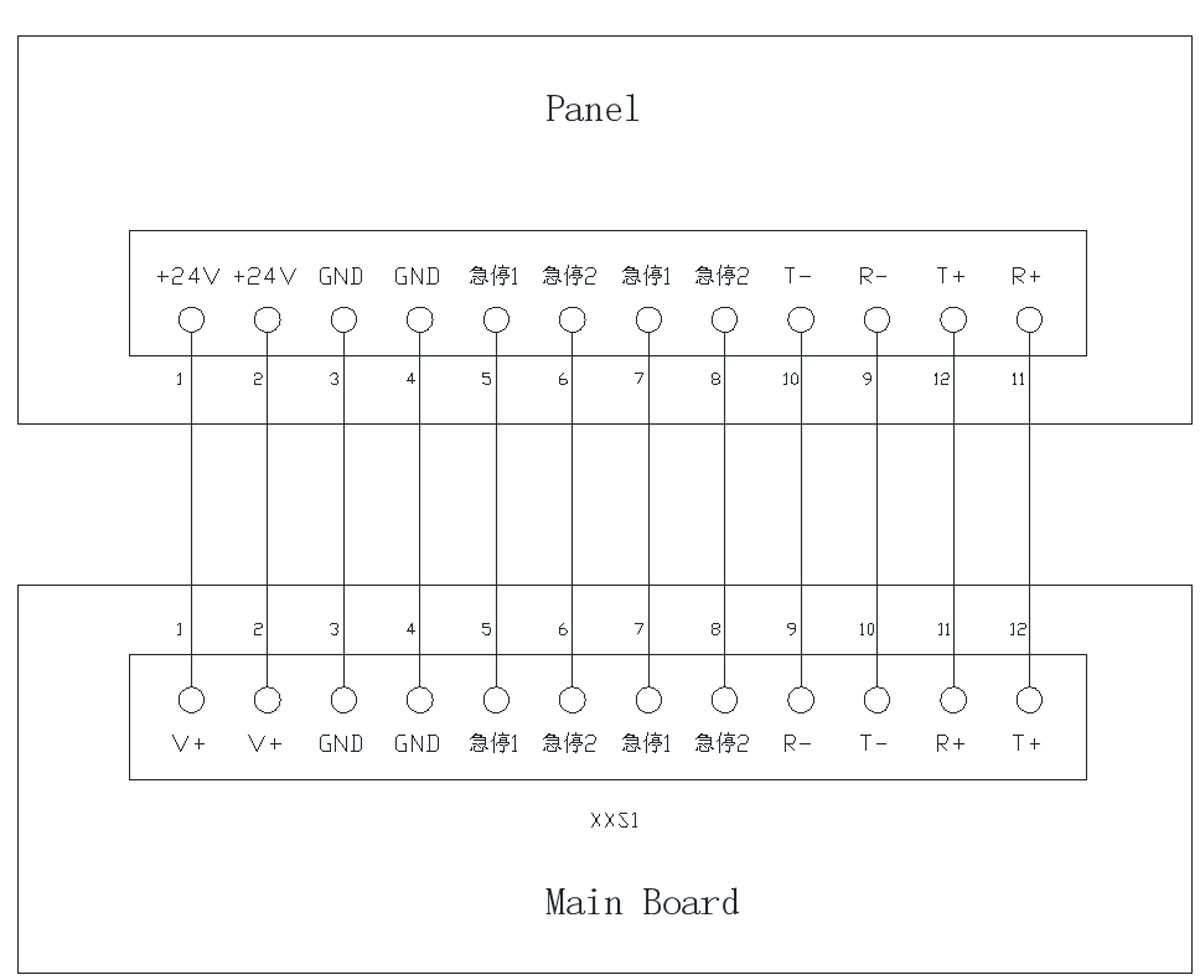
메인 보드는 제어 패널로부터 작동 지침을 수신합니다. 이 그림은 메인 보드와 로봇 팔의 제어 패널을 연결하는 배선 지침입니다.
서보 시스템의 위치 모드를 선택하세요. 명령 펄스 유형은 정방향 및 역방향 펄스입니다. 최대 주파수는 500K입니다.
10.3.1 파나소닉 A6에 연결
A6 서보 설정
| 아니요. | 이름 | 환경 |
|---|---|---|
| Pr0.01 | 제어 모드 | 0 |
| Pr0.05 | 입력 펄스 선택 | 1 |
| Pr0.06 | 입력 펄스 양수 | 0 |
| Pr0.07 | 입력 펄스 모드 | 1 |
| Pr0.08 | 운동 원의 맥박 | 10000 |
| Pr0.11 | 원을 그리며 펄스를 내세요 | 2500 |
| 메인보드 | 파나소닉 A6 | ||||
|---|---|---|---|---|---|
| 핀 | 정의하다 | 핀 | 정의하다 | ||
| 1 | P+ | 양성 펄스 | 3 | PULS1 | 펄스 1 입력 |
| 2 | P- | 4 | PULS2 | ||
| 3 | S+ | 음의 펄스 | 5 | SIGN1 | 펄스 2 입력 |
| 4 | S- | 6 | SIGN2 | ||
| 5 | A+ | 피드백 펄스 위상 A | 21 | OA+ | A상 출력 |
| 6 | A- | 22 | OA- | ||
| 7 | B+ | 피드백 펄스 위상 B | 48 | OB- | B상 출력 |
| 8 | B- | 49 | OB- | ||
| 9 | Z+ | 피드백 펄스 위상 Z | 23 | OZ+ | Z상 출력 |
| 10 | Z- | 24 | OZ- | ||
| 13 | GND | 신호 접지 | 13 | GND | 신호 접지 |
| 26 | +24V | +24V 전원 공급 장치 | 7 | COM+ | 외부 전원 + |
| 25 | 0V | 전원 접지 | 41 | COM- | 외부 전원 - |
| 36 | ALM- | 경보 | |||
| 15 | ALARM | 경보 | 37 | ALM+ | |
| 23 | SON | Servo-On | 29 | SRV-ON | Servo-On |
MR-E 서보 설정
| 아니요. | 이름 | 세트 |
|---|---|---|
| No.0 | 제어 모드 | ***0 |
| No.1 | 브레이크 선택 | 0012 |
| No.3 | 분자 | 14 |
| No.4 | 분모 | 1 |
| No.21 | 펄스 모드 선택 | 0000 |
| No.27 | 펄스 아웃 | 14 |
| No.54 | 펄스 아웃 | 1*** |
(131072 펄스/사이클 모터용)
| 메인보드 | MITSUBISHI MR-E | ||||
|---|---|---|---|---|---|
| 핀 | 정의하다 | 핀 | 정의하다 | ||
| 1 | P+ | 양성 펄스 | 23 | PP | 펄스 입력 |
| 2 | P- | 22 | PG | ||
| 3 | S+ | 음의 펄스 | 25 | NP | 펄스 2 입력 |
| 4 | S- | 24 | NG | ||
| 5 | A+ | 피드백 펄스 위상 A | 15 | LA | A상 출력 |
| 6 | A- | 16 | LAR | ||
| 7 | B+ | 피드백 펄스 위상 B | 17 | LB | B상 출력 |
| 8 | B- | 18 | LBR | ||
| 9 | Z+ | 피드백 펄스 위상 Z | 19 | LZ | Z상 출력 |
| 10 | Z- | 20 | LZR | ||
| 13 | GND | 신호 접지 | 14 | LG | 로직 접지 |
| 26 | +24V | +24V 전원 공급 장치 | 1 | VIN | DC24V 전원+ |
| 25 | 0V | 전원 접지 | 13 | SG | DC24V 전원- |
| 15 | ALARM | 경보 | 9 | ALM | 경보 |
| 23 | SON | Servo-On | 4 | SON | Servo-On |
Email: sales06@switek.biz


SWITEK IML에 문의하세요
sales06@switek.biz
+86 186 5927 5869

둥관, 광둥, 중국
HuangYanZheng©Copy Right





